フォーラムへの返信
-
投稿者投稿
-
とりとんさん
確かに、変更や解体して再利用時にはジョイナーのままがいいですね。解体したGotthardレイアウトでは、見える部分はレールを塗装していたのですが一部導通が無くなってしまい、一旦剥がして半田付けしたことがあります。バラストやシーナリーまで作ってしまうとかなり大変な作業でした。
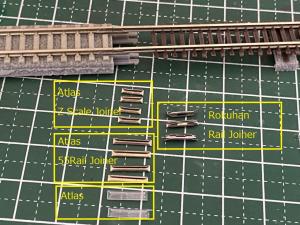
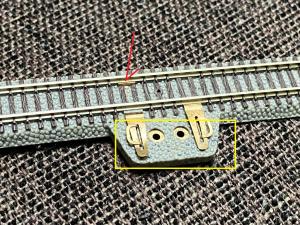
前に掲載した写真ですが、一般的にはAtlasのようなレール下部に差し込むタイプが一般的なんだと思います。ロクハンはレール上部を挟むような構造で独特ですが、道床付きレールで差し込んだ時に簡単に接続されるのは便利です。同じ道床付きレールのマイクロトレインズのものはAtlasと形状が同じため、かなり接続が大変です。
ロクハンは中央に穴が開いていて、塗装すると塗料とか流れ込みやすいのかもしれません。まあ、ジョイナーとかポイント周りは、レール塗装をしないのが無難でしょうね。
Youtubeにアップされているメルクリン公式ビデオでも、Zゲージの紹介がありますがこのビデオの冒頭でBR216?が周回している手前側のカーブ部分で車体がピョコンと跳ねるので、ここもジョイナーがちゃんと刺さっていないのだろうと思います。メルクリンレールも一番最初に購入したときは、ちょっと悩む部分でしょうね。
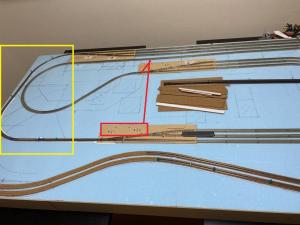
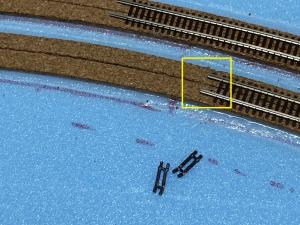
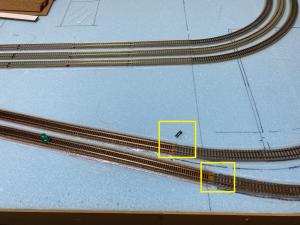
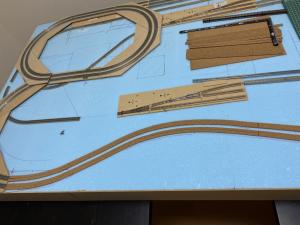
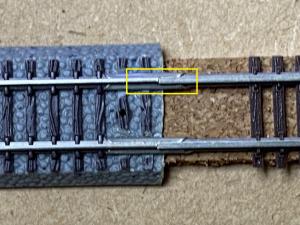
奥の隠しヤード部分の線路をほぼ敷設し終えました。黄色枠部分がちょっといびつな感じになってますが、線路を切ったりして調整するのが面倒になってちょうど良さそうな線路で接続しているためです。赤枠のポイントインジケータとSWですが、左側にループを追加することを考えるともうちょっと奥へ移動したいところです。見えないし、手が入らない。
右側は特に問題ないかと・・・ギャップ入れ忘れで時間かかりました。
横のロクハンレール部分はフィーダーケーブルを半田付けします。ロクハンのフィーダーケーブルは使用しません。こういう箇所がたくさんあります。
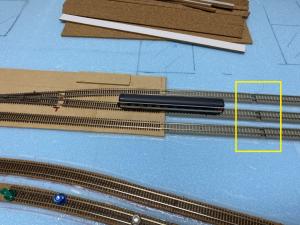
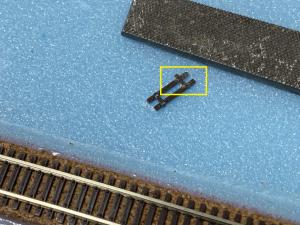
手前のランプ部分になるATLASレールですが、ジョイナーを入れるためにつなぎめの枕木を切っているところです。
枕木を切っちゃうとこんな感じで隙間が空きますが、切り取った枕木を使えばOKかと。
線路を支えていく部分をヤスリで削って・・
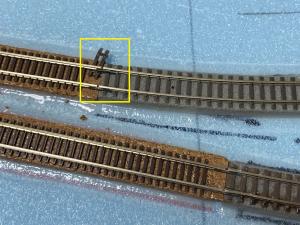
ジョイナー下に差し込んでいきます。

固定すれば目立たないですね。まあ、フレキシブルレールとか使っている方には当たり前の話かと思いますが。。レール同士を半田で固定するか考えているので、まだ固定はしていません。
ちなみに
ATLASレール - ROKUHANレール ROKUHANジョイナー
ATLASレール - ATLASレール ATLAS55レールジョイナー
って感じで使ってます。

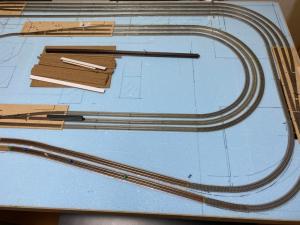
手前側の線路はロクハンレールの固定まで終わりました。ATLAS線路とのつなぎもまずまず良好です。手前側線路を設置していく前に、奥の隠しヤード部分を進めておかないといけませんねぇ。
手前側の登りランプ部分はコルクを貼り付けています。
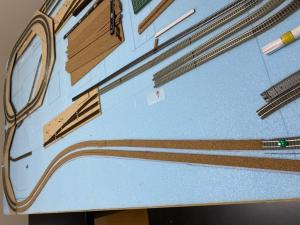
まだ、仮止めですがこんな感じのカーブで作っていきます。カーブはR500程度なので緩やかな感じだと思います。両面テープで貼りついているだけなので、良さそうならボンドで固定します。
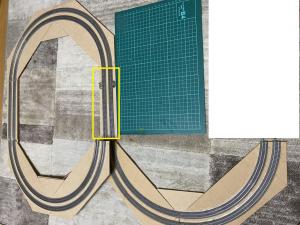
MDF材に貼り付けたループ部分をボードの方に載せてみました。奥行き方向がピッタリというかギリギリです。
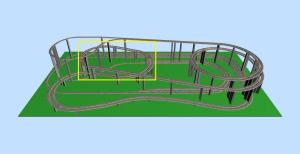
SCARMで作画したものだとループが斜めですが、手前ループの30度カーブが足りず直角に接続しているため奥のループもまっすぐになってます。
まあ、CAD図面通りにはいろいろと工作していくと合わないのは仕方ないですね。勾配もアングルメーターとか使って現物合わせしていきます。3%以内に収まるとよいのですが。。。
とりとんさん
ロクハンはコスト重視の設計で、初期のNゲージみたいな構造ですから仕方ないかもしれません。道床内にポイントマシン入れるとか、妙なところは気合が入ってますが。メルクリンは1972年に出したままですが、非常によく出来てますね。メルクリンだけで作ってもいいんですけども、やはり価格が高すぎるってのはあります。ATLASは価格も安くていいですが、枕木間隔がUSタイプなので狭くてイヤだという人がいるかもしれません。もっとも、実物の図面を見るとポイント部分は枕木間隔が狭かったりします。
DCCはVelmoも新モーター対応はほとんど出しておらず、AZLっぽい構造したBR193(ベクトロン)とかは上面がフラットなのでありますが、モーター上部が出ているタイプは難しいですね。

ZFIで個人的に作って、購入者を募っている人はいらっしゃいます。これは変換基板ですね。モーター除けの穴を開けるとどうしても実装面積が足りないので、昔のようなドロップインデコーダーは無理かと思います。

こんな感じでD&Hのデコーダー等をそのまま配線すれば新モーターでも問題ないみたいです。変換基板自体は、配線を考えれば大きさだけ違うものを作るだけなんですけども、これを永末さんに頼むわけにもいかないですし。固定用のねじ穴位置が違ったり、長さも当然違うので結構面倒なんです。あとは自分で半田付けできる人に限られちゃうってところですかね。NEXT18だとコネクタに刺すだけですけども、たぶん高さ方向のスペースが無理ですね。
サウンドは高さ方向の余裕があるものか、新モーターやロクハンモーター改造版だとモーター下に穴開けてスピーカをいれるとかですかね。サウンドはディーゼルとかSLはいいですけど、電気機関車だとあまり面白くないんですよねぇ。

あまりいろんなメーカーの線路を接続して作る人も少ないかと思うんですが、ループ追加部分をMTL製を使ったせいで、ATLAS製と接続することになりました。同じ米国メーカーということなのかわかりませんが、レール自体はコード55で約1.4mmくらいでぴたりと合います。
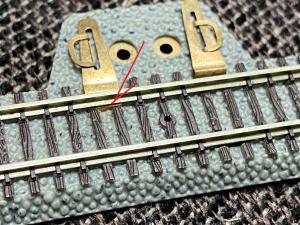
ちなみにロクハン、メルクリンはコード60くらいでレール高さ1.5mm強といった感じです。前の投稿でATLASとロクハンもレール面は合うような記述をしていますが、あくまでもロクハンジョイントを使用した場合です。ALTASのジョイナーだとレール底面に差し込むタイプなので上面は合いません。ロクハンはレール上部を挟み込むような感じなので高さの違いも問題ないようです。
MTLとATLASの差は、レール上面の幅です。MTLはかなり細い仕上がりになっていて、ATLASの方は太く見えます。これぐらいは問題なく車両が通過できます。MTLの方が細くて実感的ですが、集電を考えるとこの辺は太くてもいいような気がしますね。
あまり進んではいませんが、手前側まで作りました。このループ部分のフィーダーはどうするか悩んだのですが、MTL製のフィーダー線路が余っているのでこれを利用することに。
元々、コードを挟む部分は折り曲げてその先のレール接触部分は半田付けします。


まあまあですかね?
くまどんさん
私はBR232を購入しませんでしたが、あれもリコールだったんですね。どこかの記事で軸受けが反対だってのは見ましたが・・・日本からの返送費用も出してもらえたんでしょうか?1年半は長いですねぇ・・・
メルクリンの倒産騒動があった2009年の前後は変な製品があったような気がします。貨車のPangasなんかもそうですね。中国生産に移行した頃でした。

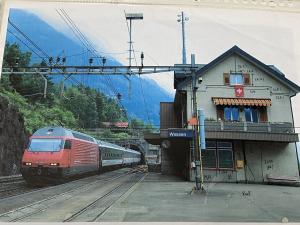
Wassen駅のホーム側に時計が見えます。よく見えないのですが、SBB標準の時計なのかも。

だいぶ前に購入したBELI-BECOというメーカーの時計です。もちろんダミーですが。このメーカーはNやH0の照明関係を作っているみたいで、これもNゲージ用です。

そんなには大きくはなかったので、使おうかと思ってます。LED照明は入っていなくて、パイプ部分から光ファイバーを挿入するみたい。光らせてないのでわかりませんが。

これは関係ありませんが、ついでに買ったフィースマンのZゲージ用ランプ。壁から出ているタイプですね。これも昔の電球時代よりは小さくてLEDも入っているようですので、小物に凝りたい方はいいかもしれません。

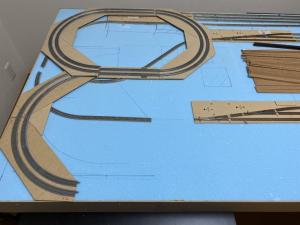
延々と切り刻んでいると、残りは180度分のカーブでいいんだと気が付き、昨日貼り付けておりました。ちょっとまだ、フィーダーケーブルの半田付けをする場所を決めないといけないです。
こんな四角い形にしたかったわけではないですが、丸く切ると端材がたくさん出るので・・・

テストオーバルは、スタイロフォームにべニア板を貼り付けているので、カットとか処理が面倒になり、結局MDF材を切り貼りすることに。
MDF材も定尺だったんですが、ホームセンターで短冊状に細かく切ってしまったのが失敗かも。2.5mmの薄さなのでカッターで切れるのは楽ではあります。あまり粉が出るような工作は、エアコンとか付けられなくなって猛暑には厳しいですね。
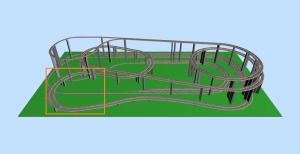
手前の勾配部分(オレンジ枠)は台枠のスタイロフォームを切り抜いて、クッキーカッター方式みたいにしようと思っていました。

隠しヤード部分と交差するところもあるので、以前テストオーバルで使っていた部材を再利用しようかと思ってます。元々はロクハンレールが貼り付けてましたが、隠しヤードで不足分を補ったので写真はMTL製です。マイクロトレインズラインのレールって、ジョイナーはカシメてあって抜けないし、ジョイナーとレールの接続が難しいとか一癖あります。発売当時は初の道床付きでうれしかったのですが、ロクハンと比べると今一歩ですね。その後もラインアップが増えませんし。
ATLASは道床付きではないですが、ポイントもDCCフレンドリーですし今後も積極的に展開して欲しいところ。米国のトレインボードで、ATLASから次はYポイント、クロス・・何が欲しいかという投票をやっていたみたいです。
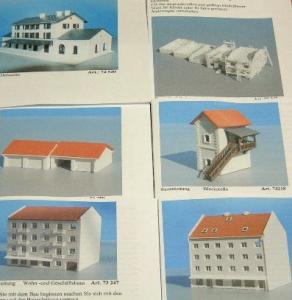
N、H0など他のゲージだと建物の種類も豊富に売られていて羨ましい限りです。Zゲージだと大体Kibriの街とかVollmerの街とか・・見た感じでわかるくらい種類が少ないですね。
コーヒーテーブルレイアウトで作っていたのは、Luetke製のキットです。柔らかいプラをNCで削っているタイプです。
難題の窓のくり抜きも多少楽になります。

完成後もなかなか満足できる出来です。

こちらはARCHISTORIESのアルテンベケン高架橋です。これはレーザーカットのキットでペーパー製ですが、レンガ部分はちょっと質感の違うペーパーを使っていて立体的です。

ペーパーの素材も変えれば面白そうですが、素材を探すのが大変かも。
レーザーカットのペーパーキットは、プラモデルと違って金型を作ったり初期投資がいらないので、FallerやNOCHなんかも新製品はレーザーカットモデルが多いですね。薄くてより実感的な感じに仕上がるのもいいかと思います。

模型店のModellbahn UNIONもZゲージのレーザーカットモデルを出して来ています。KibriやVollerのプラモだと40ユーロ超えているものもあるので、半額位でよいですね。
ペーパーキットの難点は、銅像とかエンブレムといった立体的なものが作りにくいのがありますね。その辺は何かを流用すればいいですが。。

ペーパーも素材を探せばもっといろいろなものを作れそうなんですが、イギリスのMETCALFEというショップの素材を買ってみました。N、OO用しかないのでN用なんですが、ザラザラした質感を期待したものの単に印刷しているだけでした。切り抜けばそれっぽくみえるので、これでも満足できるかもしれません。
レイアウト用に作りたかったのはWassen Stationです。

FALLERのこんな駅舎も買ってみましたが、なんだかちょっと違うんですよね。

当時はGoogleのストリートビューもこの地域は見えなくて、Webやらビデオの一部を画像にしておりました。ベーストンネルが出来るまでは、頻繁に列車が行きかう名所ですので、撮り鉄の方もたくさん行っていたようですがさすがに駅舎には興味がないようです。特に特徴があるわけではないでしょうし。。

特に困ったのがホーム側の写真が見当たらない。Gotthardのキャブライドビデオ(運転席からの撮影)とかで見えるくらいしかわかりませんでした。
現地に行って測ることができればいいのですが・・・遠い。比較ができる写真から大体の寸法を決めていくしかないですね。正確性というよりは車両とのバランスかと思ってます。

なんとなくこんな感じだろうというCAD図面は出来ましたが、素材は何で作るかと悩みが出てきますね。プラ板でも試作しましたが、窓を抜いていく作業が大変で窓枠もかなり細いのでいまいちでした。
当時、レーザーカッターの安価な製品が出てきて6万円台で購入できました。これはべニア板で試作中の模様。木材だと細い部分が焼け焦げて失敗でした。
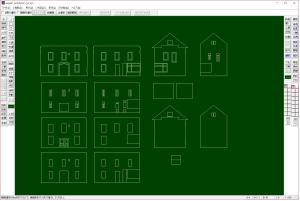
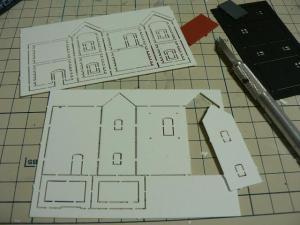
ダイソーの厚紙だとうまくいきそうでしたので、CADデータを貼り合わせするものに変更しました。JW-CADで作って、DXFへ変換してからレーザーカッターで読み込ませるデータにさらに変換してます。キットを作っているわけではないので、そのまま部品はバラバラになりますが、自分で組み立てるだけなので問題はありません。

貼り重ねるとそれなりに立体感も出てきます。壁の角は合わせるためにへこみを作ってありますが、組立て後に壁色のパテで仕上げています。

まあまあ、それっぽいものは出来たような気がします。
-
投稿者投稿