フォーラムへの返信
-
投稿者投稿
-

フライス盤で削りました。片線が外れたモーターで当たりをみながら削りましたが、もうちょっと少なくてもいいのかも。

手で回した感じでは良さそうです。

新品のモーターを搭載します。また線が切れるんじゃないかとヒヤヒヤです。


とりあえずこの状態でアナログで回転させてみてます。最高に回しても40mAくらい。静かというよりは、スパーギアの当たりのせいなのか回転が上がるにつれてギュイーンとうなりますが大きい音ではないです。

Velmoなのでそのままモーター線を半田付け。
ボディを付けずに走行中。5極でも走ってましたからモーターが変わっただけですね。


ボディを付けるとギア音が反響してまるでサウンドデコーダーみたいですが、それほどうるさいわけではありません。
oceanさん
ちょっと覚書きとして・・・
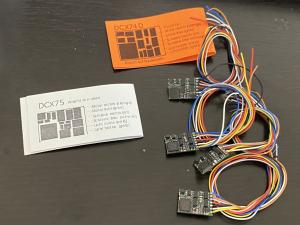
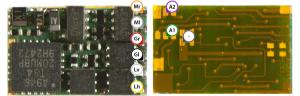
DCX75の裏面にAUX1とAUX2がパッドとして出てますが、ロジック出力のためそのままLED等を駆動できません。
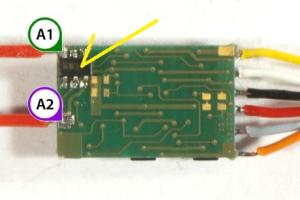
どうもこのパッドは6pinのMOSFETが搭載するパッドのようで、ここにMOSFETを買って半田すればもっと電流が流せますし、両極性化基板もいらないかと。
実はDCX74も裏面にAUX1とAUX2が出ていて、DCX74Dだとこのままですが、DCX74DVを購入すると(今となっては買えませんが)ここから緑と紫の線が出ているはずです。
MOSFETを新たに半田するのも面倒ですし、両極性基板があるのであればそちらに搭載されているトランジスタ出力を使うのがいいかと。。
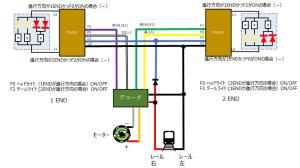
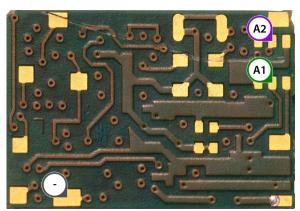
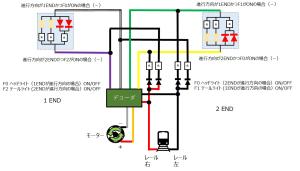
たぶんこんな感じです。V2側にダイオードが入っているようなので、赤線側にダイオード入れてV1に接続すれば中で青線と同等になります。出力のL0、L1がLED基板側の極性でどちらになるかはわからないですが、上図でいけばF0でヘッドライト、F1、F2でテールライトの制御ができるんじゃないかと思います。
DCX75のCVは、たぶんCV35=4、CV36=8にすれば良いんじゃないかと思いますが、これも試してないので不正確かも。
まあ、改造をやり直してもテールランプを消せるようになるだけですが(笑)
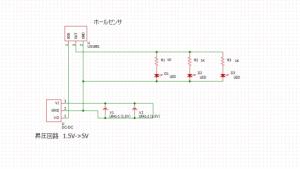
あまり進めていませんが、こんな感じで電池による駆動にしようかと思ってます。単純にボタン電池から昇圧回路で5Vにしてホールセンサー経由でLEDを光らせているだけです。ホールセンサーは屋根付近に設置すれば、外部から磁石でON/OFFできます。
隠しヤードとかでは磁石の付いたゲートを通過した時にOFFにできますし、出発側には同じように磁石でONできるゲートを作ってやればよいかと。問題はどれくらいの時間点灯しているんだろうということでしょうか。
とりとんさん
ZFIでそんな話題があったと記憶してます。私も初期の頃はDCX74を愛用してましたし、5極モーターの頃は、デフォルトの設定でスムーズに動き、小型なのでよかったですね。Lok Shopやよく使っていたどいつのショップで取り扱いがなくなってからは、D&H製がメインになりました。VelmoがD&H製をベースにしているのもあります。
デコーダーの箱を見ているとDCX75の紙だけはありましたが、DCX75自体は見つかりませんでした。買った記憶は無いのですが。。DCX74は未使用が4個ありますので何かありましたらご相談ください。
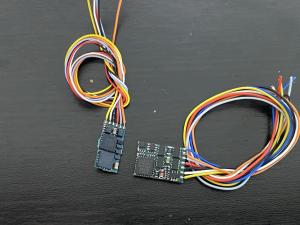
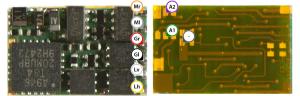
左がD&HのDH05です。右のDCX74と比べても小さくて線が出てませんが、アンプで増幅されたAUX1、2もあります。今はさらに小さいPD05(5.2mm X 8mm)も出ています。コアレス化で消費電力が小さくなったので、デコーダーも小型のものを使えるのはいいですね。
oceanさん
ロクハンのポイントスプリングを使っているんですね。ロクハンポイントはショートして焼けるとスプリング部分が先に熱で溶けてしまうような・・残っていれば使えるか見てみます。
AYANOさんところはトマランを購入したことがありますね。Zゲージは視野にないのでちょっと基板が大きかったりはしますが。SZLの動力のままだと両極性化基板ははいらないような気がします。ありがとうございます。
DCX75は一度も購入したことがないのですが、
裏側のパッドにAUX1、AUX2が出ていて(緑と紫)ロジックレベルなので直接LEDを駆動出来ないですけども、両極性化基板を2個使えばテールのOFFもできるようになるんじゃないかと思いました。
そのままの回路じゃないですが、白/紫と黄/緑の組み合わせで間に両極性化基板入れればよいかと。黒線は両極性の青線ですね。
CTもサイトがつながらなくなっていて、事業停止なのかも。Tranさんが亡くなってからしばらくは売っていたようですが、個人事業だと継続性が難しい問題ですね。
oceanさん
コメントありがとうございます。oceanさんの改造記事の投稿を見てました。
ロクハンでもトラクションタイヤ履いているので、牽引力は十分でしょうね。リアとは両極性化と接触方法で悩みますね。このRe6/6 Cargoもライト基盤部分のスプリングが無くなってますし、他の方法で接触させるかとか考え中です。

もう一度バラして黄色枠部分を外しました。

元のねじ穴は2.5mmに広げてプラ棒を挿入

余分な穴はパテで軽く穴埋め。


まあ、こんなもんでしょう。

通常は、畳んだ状態でしかないはずです。


つまようじでそっと持ち上げると上げた状態にもできます。
モーター換装ばかりやっていて疲れてきました(笑)コアレスモーターにすることで3/5極モーターでよくあるコギングでの発進不良とか無くなりますし、低消費電力化による線路の汚れが少ないとかメリットは多くあります。
ロクハンモーターの軸がブレるのはありますが、ロクハン製品が悪いわけではありません。

仕掛り中で放置のRe4/4 Iでは下回りにショーティ動力使ってますが、音もなく走行します。聞こえるのはジョイント音だけです。これはメルクリンの新モーター搭載製品でもあまりないですね。新しいBR193も少しうなりが聞こえます。

BR181.2も静かですね。もう少し安価だったら下回りを交換したいくらいです。

雑誌の付録で入手したキハ52の下回りもロクハンデコーダーを搭載して静かに走行します。これは2軸駆動ですが、トラクションタイヤのせいで勾配でも問題ありません。あまり走らせる機会がないのですが、メルクリンのカーブポイントで引っかかるような感じはします(あくまでも私が持っている線路ではということですが)
トラクションタイヤが嫌いな方もいらっしゃいますが、勾配のあるレイアウトでクリーニング貨車を牽引して確実に(笑)戻って来るのはBR181.2だったりします。
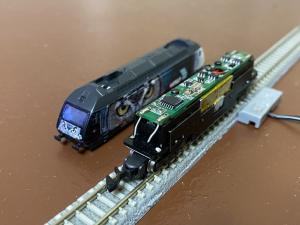
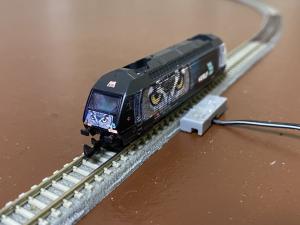
Re460は後、4両くらいで完了なんですが、かなり苦戦中です。DEP1でアナログ運転を確認してもデコーダーで走りがおかしかったり、ギア鳴りがひどくなるものがあって修正中です。写真は、たぶん手持ちのRe460でも最後に買ったものだと思います。これはなんとかうまく走るようになりました。

高輝度電球色LEDになっていて明るく光ります。

ちょっと曲者なのは、LED基板が新しくなっていて極性が従来のものと逆になってます。しばらく悩みましたが、DE29デコーダの設定でなんとかなりました。
oceanさん
そうですね。純正のウォームギアの方がよさそうです。
シャフトが短いRe4/4は割と調子よく仕上がってます。
oceanさん
ロクハン付属のウォームだと真鍮なので曲がっていてブレたりもします。

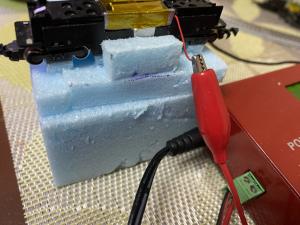
適当にスタイロフォームで作っているので汚いんですけども、こんな台に載せてDEP1でアナログ状態のまま電流値とギア鳴りを確認してます。ウォームギアはギア鳴りしないはずなので、ガリガリ音が出ているとどこかおかしいんですよね。
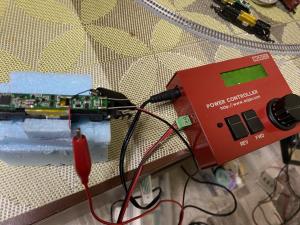

デコーダーをネジで締め付けると微妙に位置関係が変わるので、デコーダーをねじ止めしてからDEP1で再確認してます。これでOKならそのままモーター線を半田すればよいだけなので。

初期の改造だとロクハンモーターでモーター固定もしていない状態でした。自分で記事に軸がブレていると書いてましたが、すっかり忘れてました。
モーターホルダーで固定するとロクハンモーター軸がブレるので、マウントを削ってみたり調整してました。

ナローガレージで購入した0716DTは、今のところ単体で回してみても軸ブレは無いです。どちらも中華製なのでしょうけども、ロクハンは検品していないのかそれともユニバーサルジョイント前提でブレてもいいと判断なのか・・モーターマウントを付ける方法だと0716DTの方が良さそうです。あとは回転数が違うとかウォームギアが0816DTは附属していないとかありますが。。
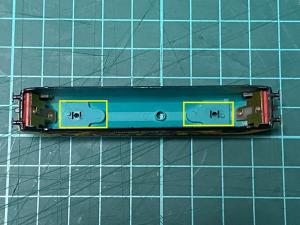
Re460は黄色枠の辺りがデコーダーに当たるようです。

思い切ってパンタの底面部分を切り取ってプラ板で塞ぐという方法も・・

これくらいまでヤスリの先端で削ると大丈夫になりました。
Hello sebek1974,
good job. Maus V1 Prototype dummy turret.
oceanさん
そうなんですよね。0.2mm薄ければ当たらないかも。
残りの車両もパンタ下を削ってみます。パンタも共通パーツなので仕方ないですけども、もうちょっと小さければいいですね。
-
投稿者投稿