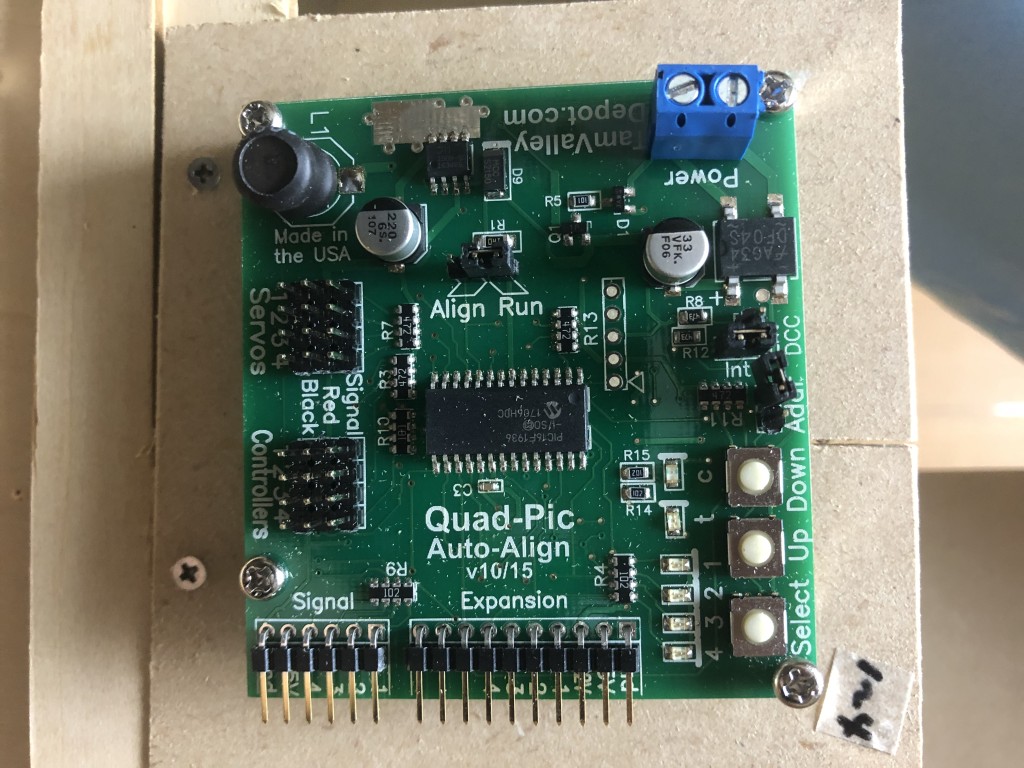
Tam Valley Depot製 Quad Pic Auto Servo Decoderです。1台で4個のサーボを駆動することが出来ます。
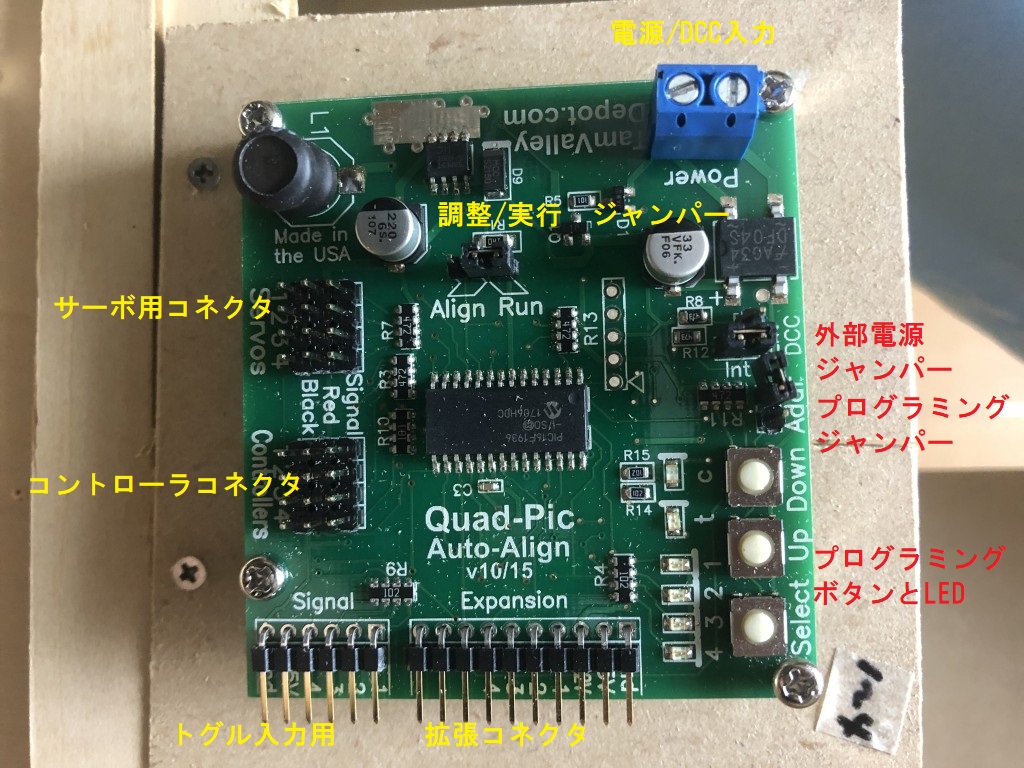
写真では、左側にサーボとFasciaと呼ばれるコントローラ(後述)の接続コネクタがあります。中央上はサーボの位置調整か、実行状態にするのかの選択ジャンパーがあります。右上には電源/DCC入力です。通常はDCC信号線を接続すれば、同時に電源として供給されます。右の赤字は外部電源ジャンパーと書いてみましたが、たぶんこのコネクターに電源供給するのでしょう。DCCコマンドコントローラの出力が小さい場合は外部電源の使用もあると思います。その下がプログラミングジャンパー(Addrの表記)でここをショート(プラグを差し込む)とアドレスの書き込みが出来ます。下側のトグル入力や拡張コネクタは、外部からの切り替え信号を入れたり、リレーのオプションボードを接続してポイントのフログ極性の切り替えに使えるようです。もっともフログジューサーを使えば不要ですが。
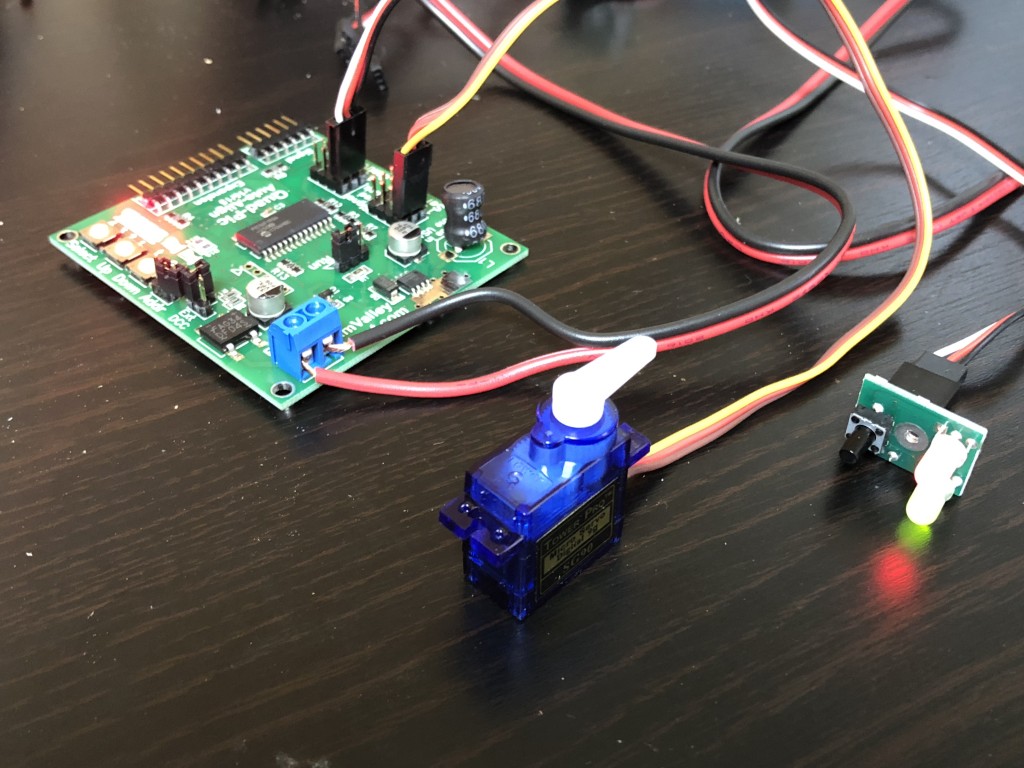
サーボ1個とFasciaコントローラを接続しているところです。青いコネクタにはDCC信号が接続されています。FasciaコントローラはスイッチとLED2個が搭載されているボードで、DCC制御に必須ではありません。ボタンを押すとサーボが動作して、LEDがその方向を示す手動のボードです。マニュアルに回路図も載っているので、コントロールパネルを作る場合はそちらを参考に作ってしまえばよいかと思います。
1.アドレスの設定

Addrと書いてあるジャンパーをショートするように差し込んで、プログラミングモードにします。デフォルトではアドレス1になっています。プログラミングモードにしたら、コマンドステーションから普通にポイントを制御するように切り替え信号を送ります。その時に変更したいアドレスで制御信号を送ればアドレスが変わります。4個の制御アドレスが必要なのでデフォオルトの1だと1~4、5にセットすれば5~8になります。個別に違うアドレスにすることはできません。アドレスが変わるとLEDが2回点滅します。確認したらショートさせていたプラグを外します。
2.サーボの調整(手動モード)

Align/Runのジャンパーを左側のRun側をショートするようにプラグを差し込みます。

「Select」ボタンを1秒ほど押すと「1」と「c」のランプが点灯してサーボ1のcポジション(cがClosedで、tがthrownです。一般的にはClosedが直線で、Thrownがカーブ側という認識のはずですが、YポイントやらカーブもあるのでClosed側が本線(Mainline)ということらしいです。)の調整を「Up」「Down」のボタンで位置調整します。もう一度「Select」ボタンを押すと「t」が点灯するので、そちらの位置も「Up」「Down」のボタンで調整します。さらにもう一度「Select」ボタンを押すと「2」が点灯して・・を繰り返して1~4のサーボ位置調整を行います。最後に「Select」ボタンを長押しして保存と終了が行われます。
3.サーボ調整(自動)
Align/Runのジャンパーを左側のAlign側をショートするようにプラグを差し込みます。
「Select」ボタンを1秒押してプログラミングモードに入り、「c」「t」の位置それぞれ4つの値があって、それを「Up」「Down」のボタンで設定できるようです。(まだこのモードで設定してみたことがありません。試してから記事を更新します。)電流センサーで「c」「t」の位置の限界値を探るようです。なので、実際にポイントを動かせる状態にサーボを設置した後の調整になることが前提ですね。
4.Fasciaコントローラ

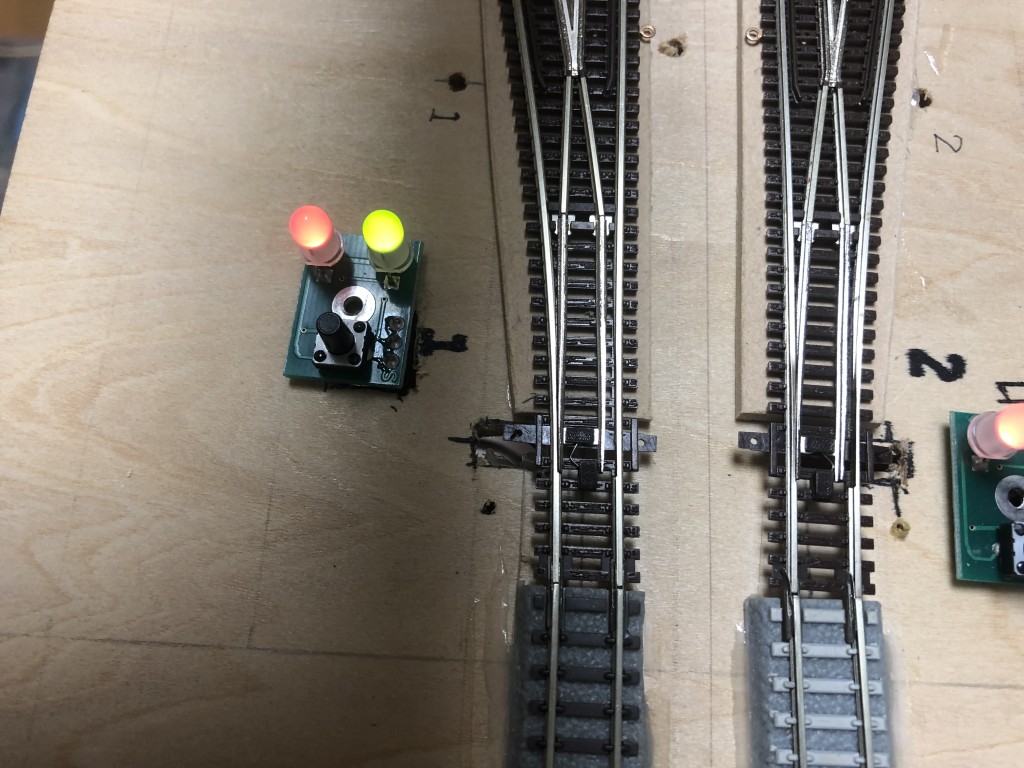
普通は線路脇に設置することはないと思います(笑)隠しヤードに設置しているので、わかりやすいと思い、ポイント脇に設置している例です。カッコよくするためには、裏から固定してLEDとスイッチ先端が出るようにしたほうがいいですが、面倒なので差し込んでいるだけです。ポイントの位置とLEDの色の入れ替わりを見ていただくとわかるように、開方向が緑で示されています。開方向だけわかれば良さそうですが、自動運転ソフトを起動した際にどちらに切り替わっているのか実際とソフトで認識が違う場合があるので、その際にはスイッチを手動で押して切り替えるのも手段としてあった方が便利ですね。
実はこの製品は、購入時も旧製品で今は新しいOctopus IIIといった8個まで制御できる製品に代わっています。Fasciaコントローラは変わりませんが、Octopusだとサーボの調整スイッチ類が分離されていて、そちらの方が便利かも。コントロールパネルを作る予定がないので、わざわざ一体になっている旧製品を選択しました。新しいものも試してみたいような気がします。
2023.1.21 追記
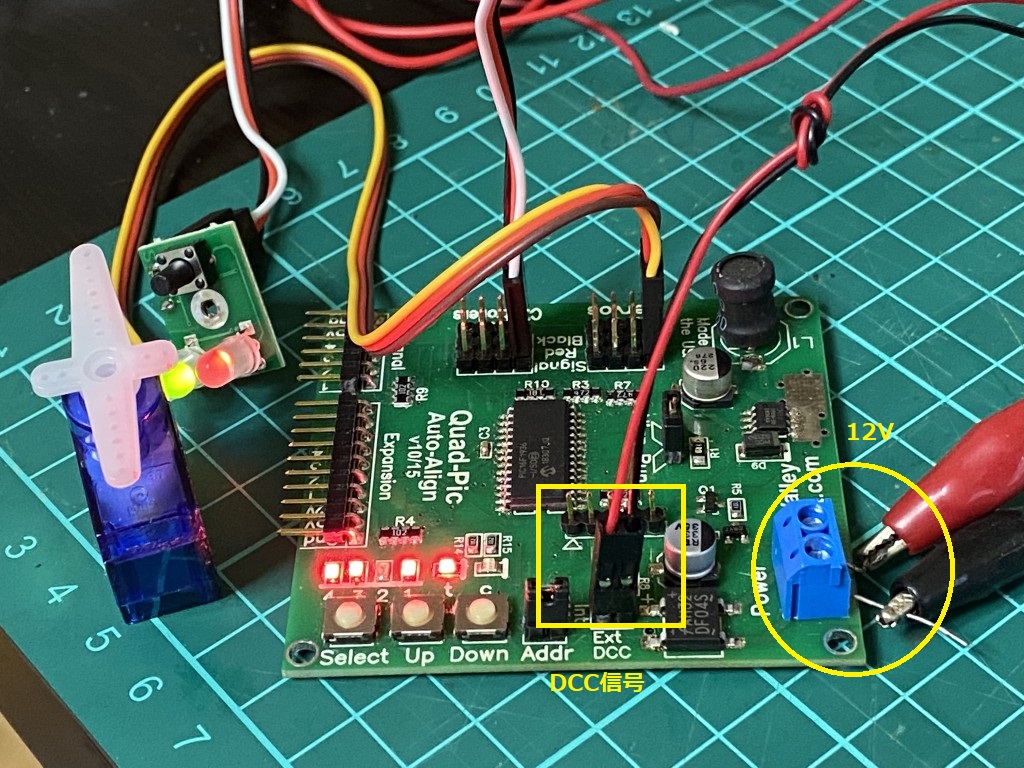
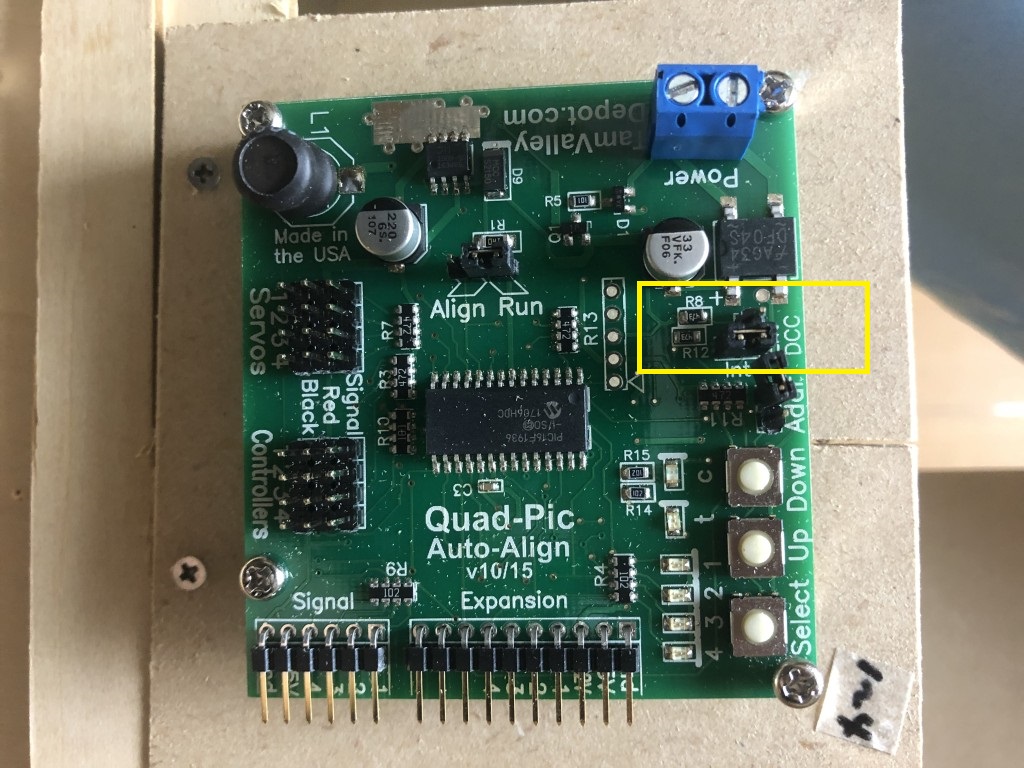
サーボのモーターを動かす関係で、動作中はサーボ1個あたり150mAが必要とマニュアルにも書かれています。走行用のDCC信号とは別にブースターを付けて供給するのがお奨めとは書かれていますが、ブースターも安くはないので外部電源にしてみました。元々DCC信号を入力する右側のターミナルから12Vを供給して、中央あたりのExt DCCと書かれた端子からDCC信号を入れています。写真右のショートプラグを外して入力しています。
この状態で12V側の電流値を見てみると、定常的に30mAくらいで1個サーボを動かすと20mAくらい流れます。ただ瞬間的に300mAになることもあって、外部電源にしておいたほうがいいようですね。