■CV値を書き換えねば
前回のデコーダーのお話で、Zゲージへのデコーダー搭載が難しいけれどもドロップインとかドイツやら米国でも工夫はされて来ました。モーターもスタックしちゃう3極とか5極モーターなんかと格闘しながらですから、結構ハードですよね。まあ、希望するような車種も出てこないし、なんでも自分で工夫しながらやっていかないといけないZゲージの宿命でしょうか(笑)
デコーダー搭載はなんとかクリアできたとしても、デコーダーのプログラミングが出来ないと話になりません。最低でも機関車のアドレスを変えないと個別に制御が出来ませんね。CVと呼ばれているところの値を変更する必要があります。



Compactの表示器の様子です。シンプルでいいですけども、この表示だけでプログラムも一応出来るんです。「L 3」って出てますけど、デコーダーのアドレスは最初は「3」にすることが決まっていますので、買ってくるとすべて3です。これだとみんな3で同時に走ってしまうので、アナログと変わらないですよね。ただ、この表示器でボタンを押しながら書き換えるのは出来なくはないのですけども、他の値はどうなっているんだろうとかいろいろストレスが溜まります。

結局、Compactでのプログラムはアドレス程度で諦めて赤い箱買いました。
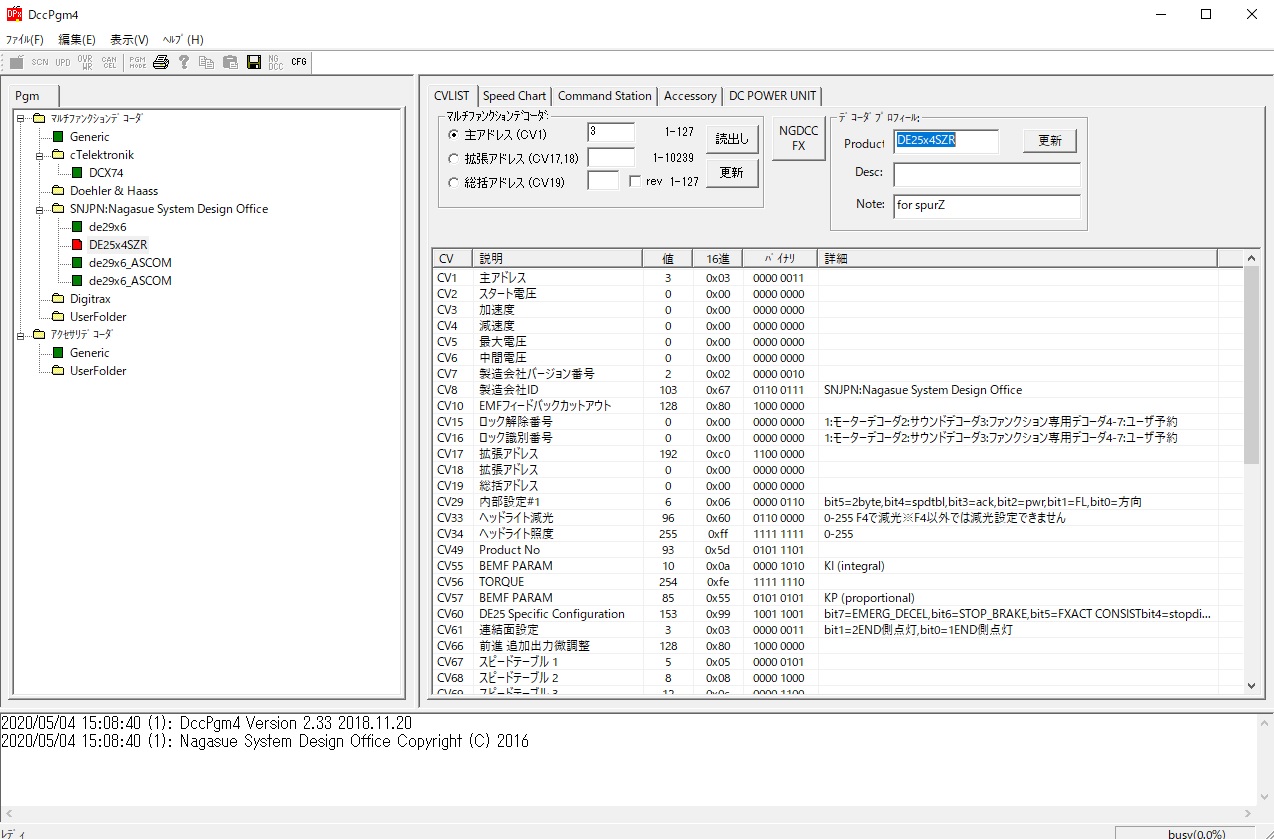
こんな感じでスキャンとかするとすべてのパラメーターが読み出せて便利ですし、変更に該当するところをダブルクリックして個別に変更も簡単。(定義ファイルがあるものだけですが)右に各パラメータの説明もあって、Compactではマニュアルを片手にやっていたのが何だったんだろうというくらい便利でした。
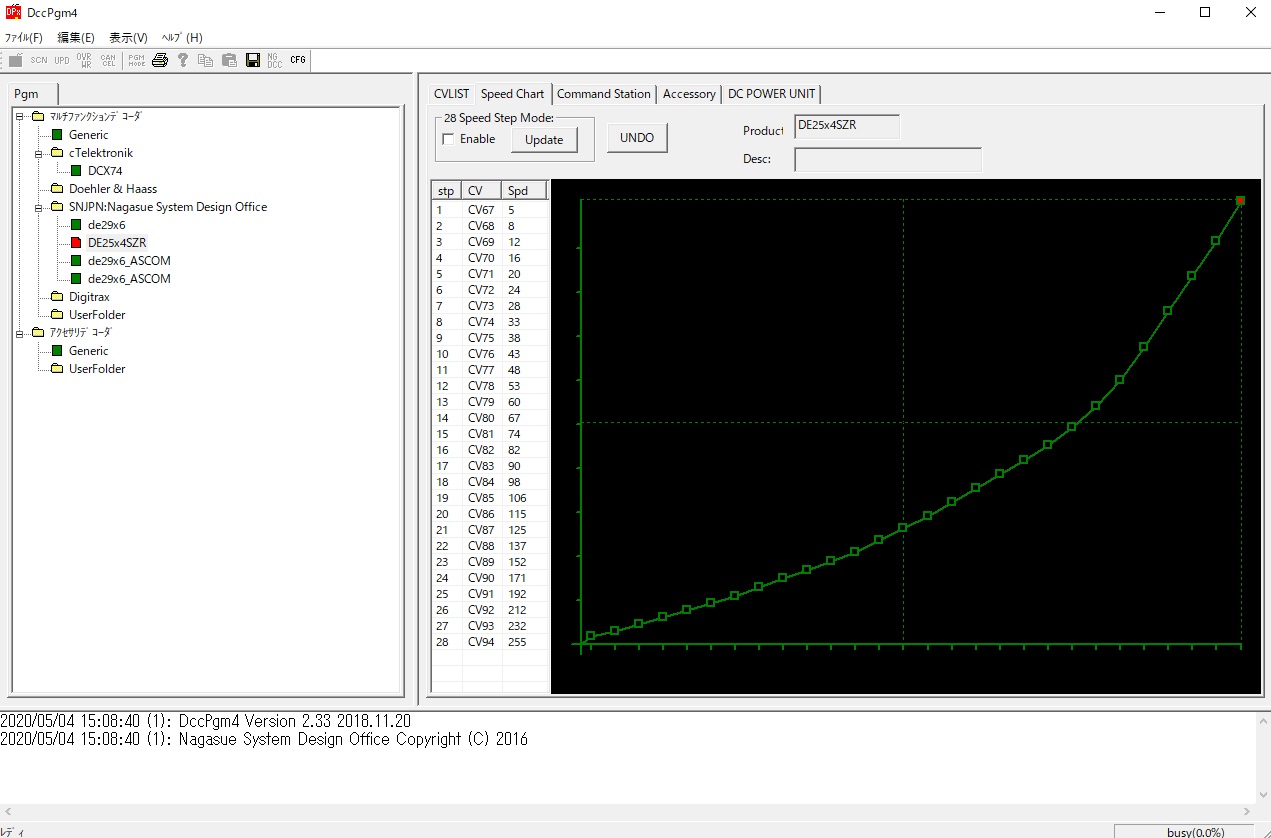
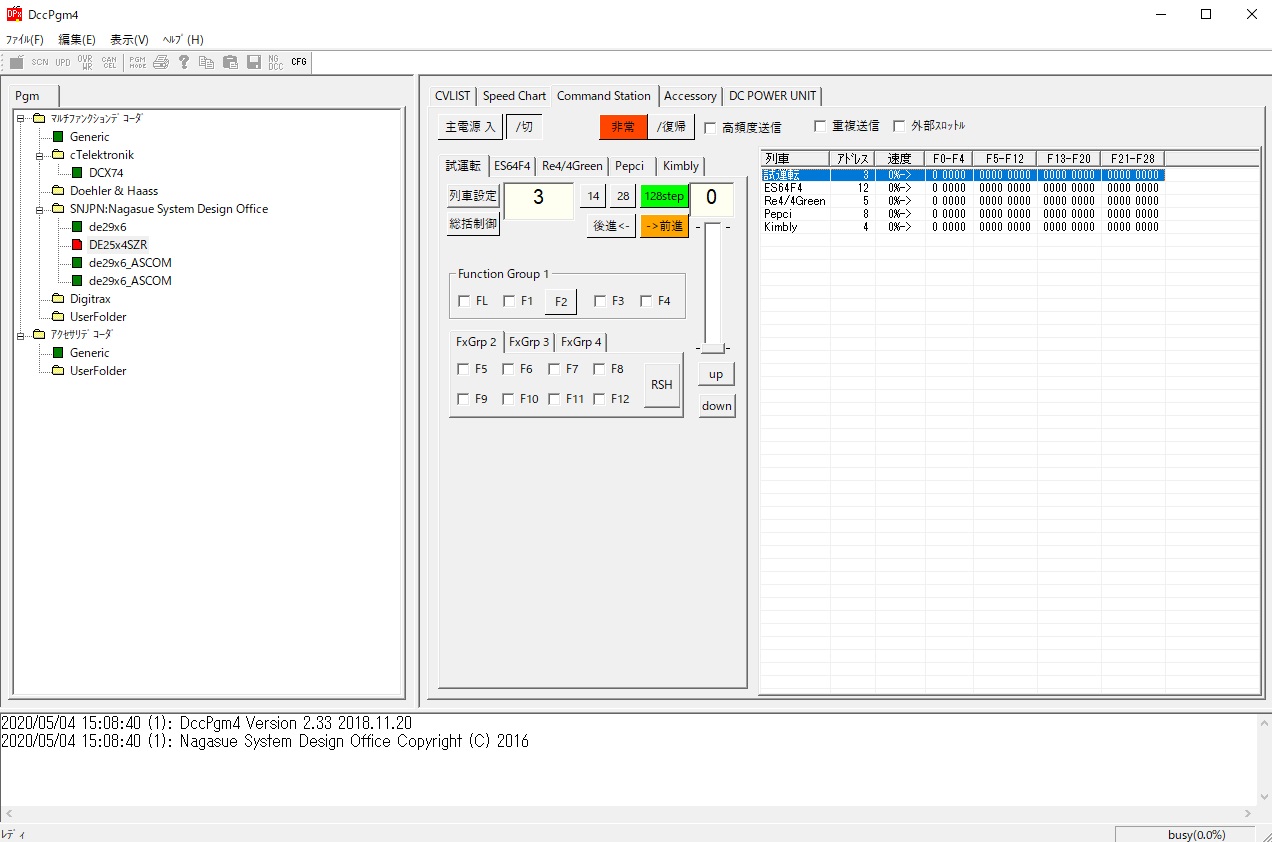
スピードテーブルをマウスで変更したり、コマンドステーションの画面で運転したり。。
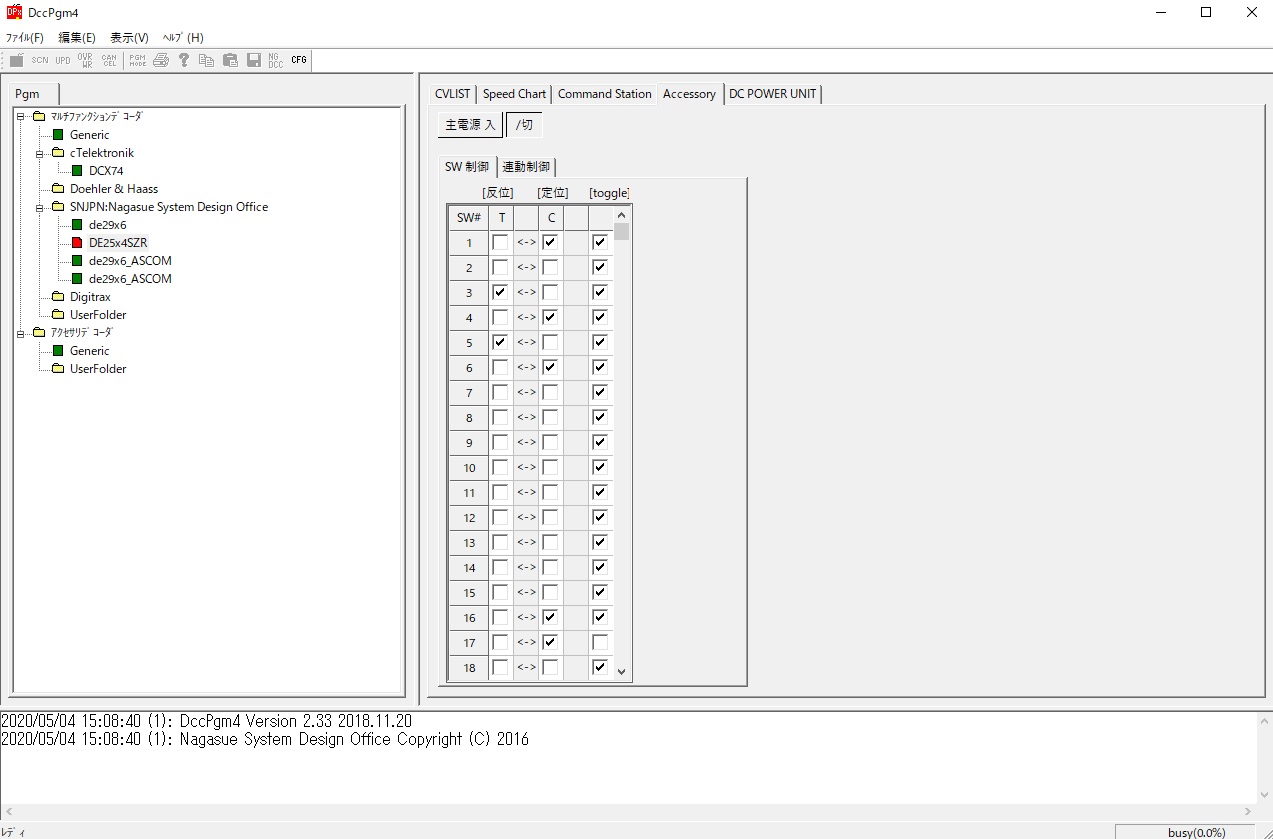
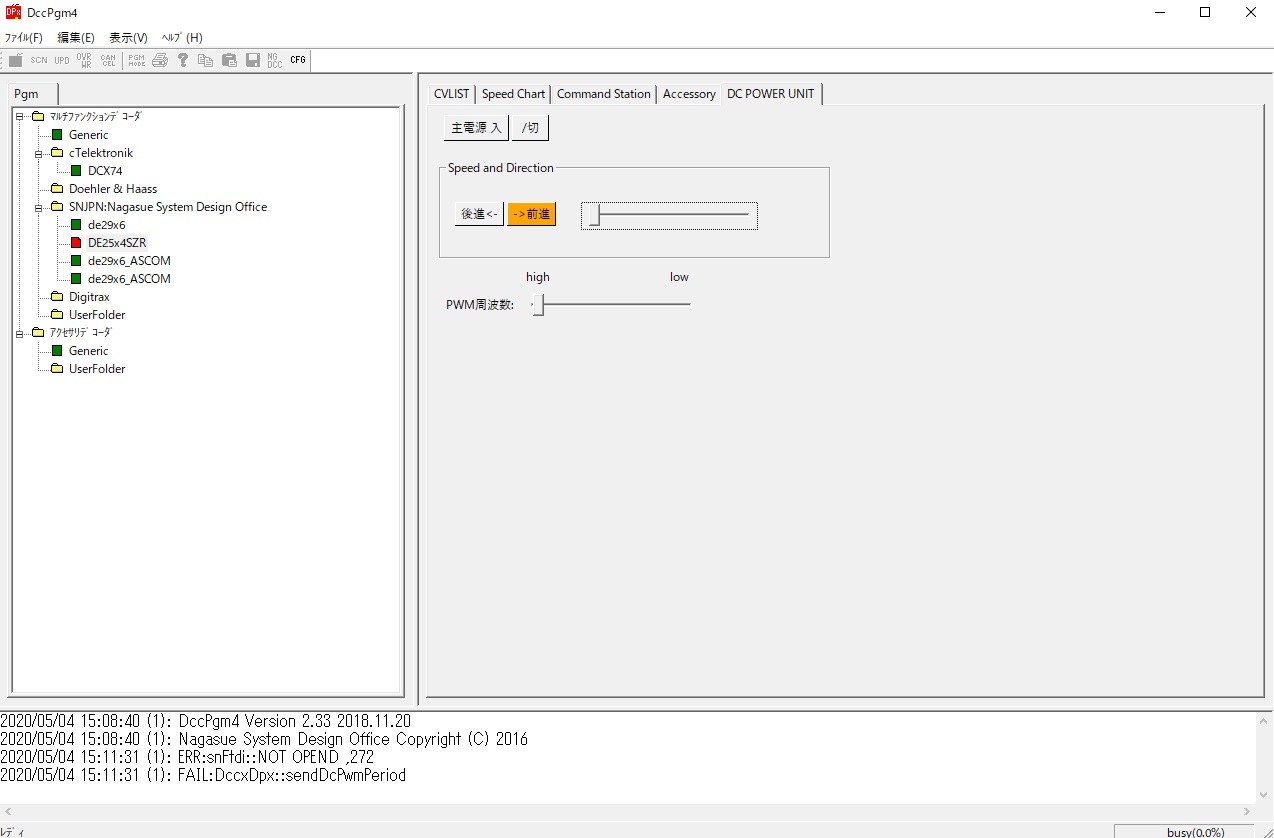
ポイント制御やアナログ運転も出来ます。

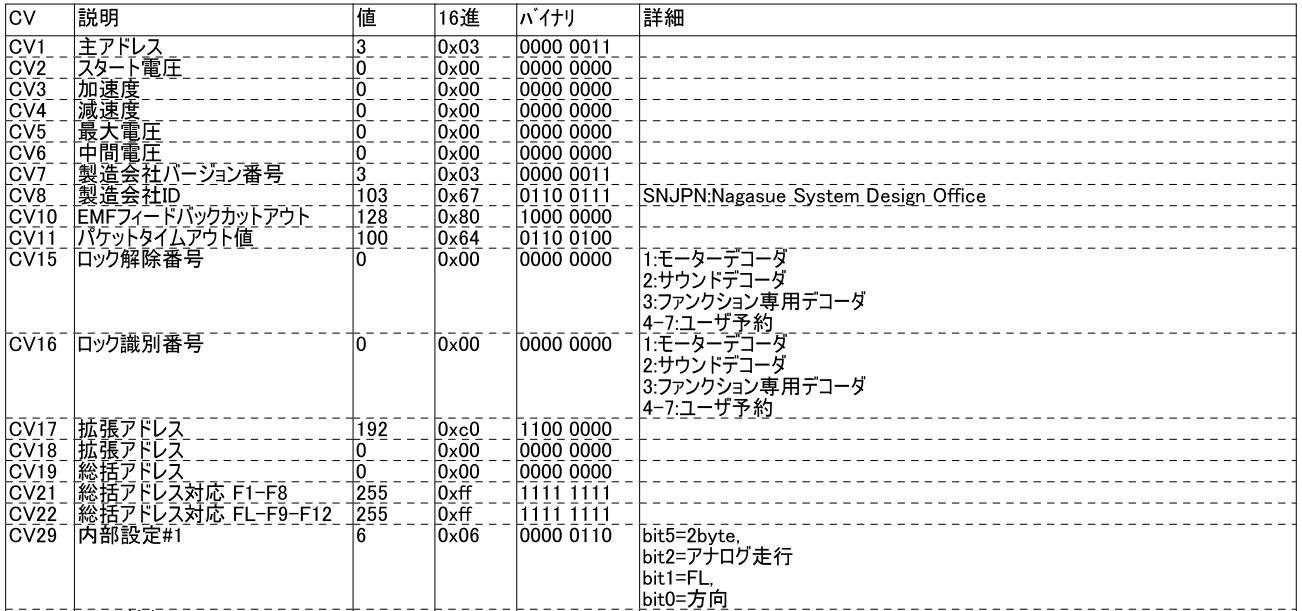
個別のCVをダブルクリックで書き換えているところです。右がCVの解説書(それぞれのメーカーでいろいろパラメータがあります)
■自動運転への道(JMRI編)
「0-4. 列車の位置を知るためには」で書きましたが、Gotthardレイアウトで酒でも飲みながらゆったり鑑賞・・・が目的で自動運転化を計画致しました。
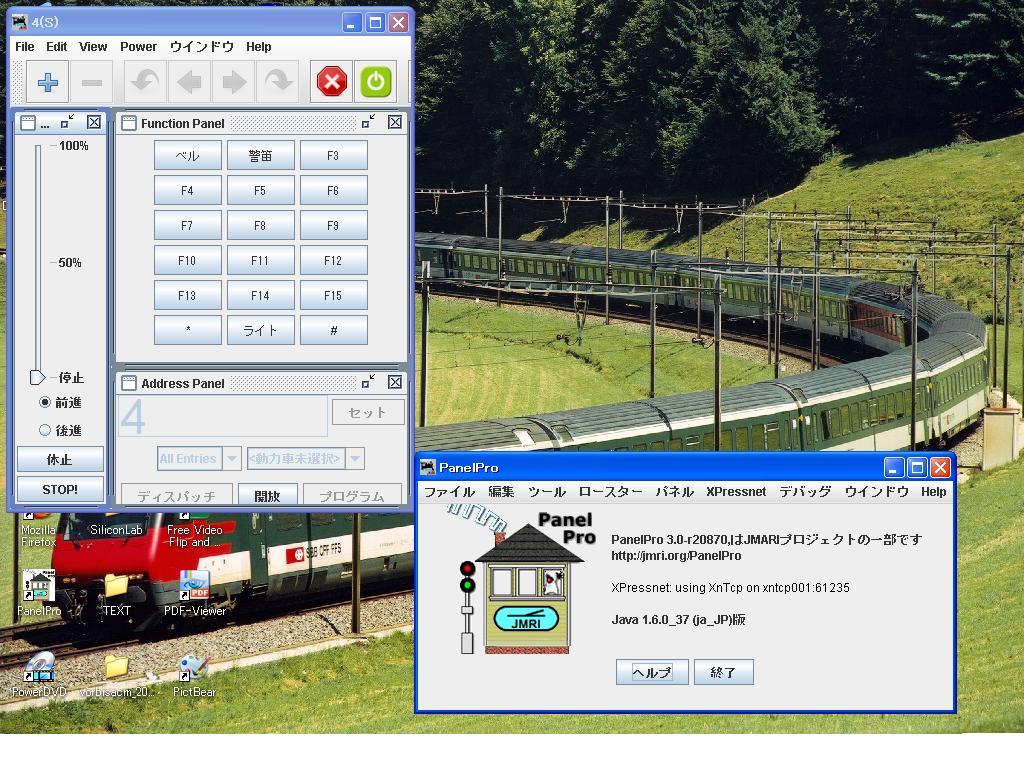
当時、検索してよく目にしたのがJMRIというフリーソフトです。Javaで書かれていてWindows、Mac、LinuxとPCのOSを選びません。無料ってのも魅力ですよね。
JMRIって「DecoderPro」「PanelPro」「DispatcherPro」「OperationsPro」「SoundPro」(2020年現在)にプログラムが分かれています。「PanelPro」で路線図みたいなものを作成して操作するまではいけたのですが、その後どうやって自動運転するのかわからない・・・どうも自動で動かすためには「Logix」他のツールでやらないといけないみたいで、基本はプログラミングが必要のようです(やってませんけど)
自動運転ソフトだと思ってJMRIのサイトを見ていたので、わかりにくいなぁ・・とか思っていたのですが、米国でのプロジェクトなのでやはりアメリカのスタイルに合わせたソフトなんですよね。どうも「PanelPro」で全体の運行状況把握、「DispatcherPro」はその名もディスパッチャーですからポイントとかを操作する人用、「OperationsPro」は実際に運転する各担当に割り振る・・みたいな役目みたいです。アメリカの大きなレイアウトで、クラブとか集まって複数人数で運転を楽しむみたいな用途にはピッタリです。手動操作がメインで、自動運転はほんの一部だけならスクリプトを書いて運転させようと思うのも効率がいいかも。
結局、pythonとかスクリプトを作ればいいのでしょうけども面倒。「DecoderPro」だけは便利なので今でも愛用したりしてます。
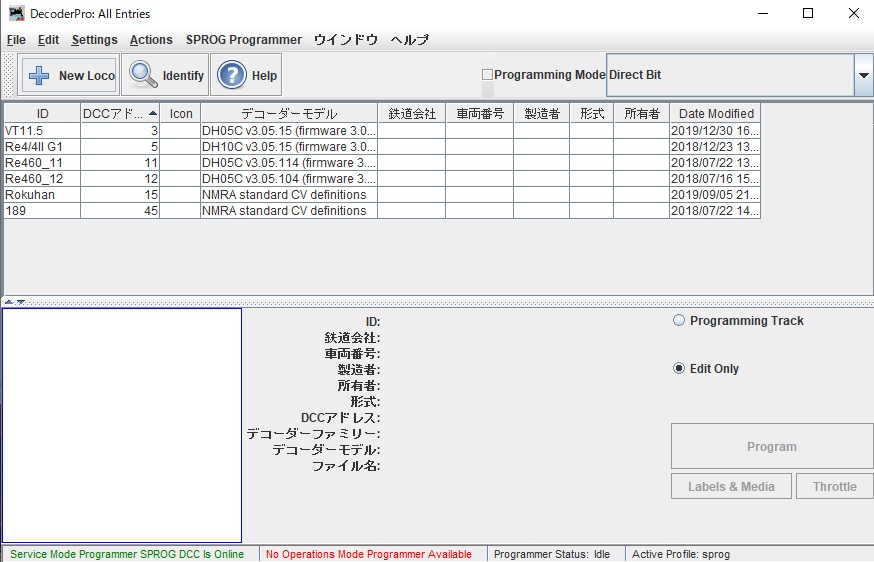
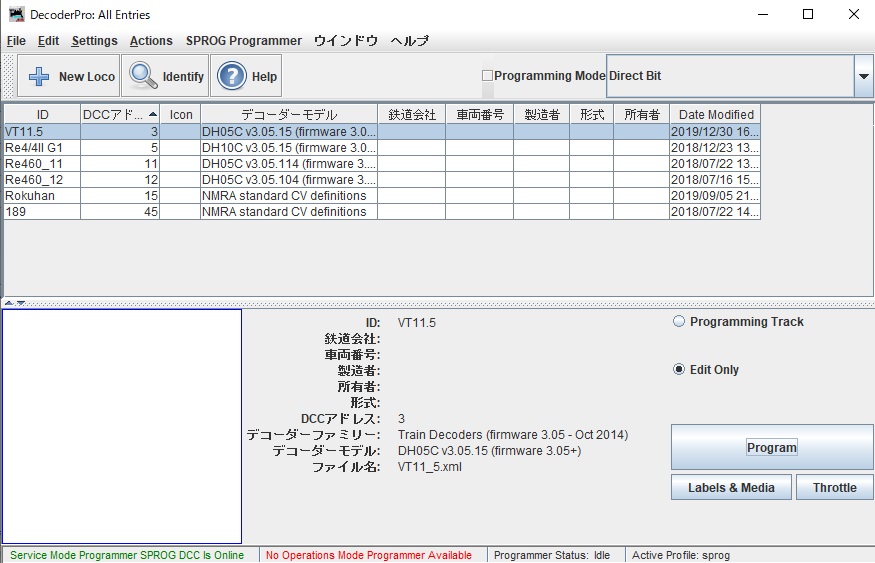
機関車を選択、あるいは新規追加で右下の「Program」を押すと
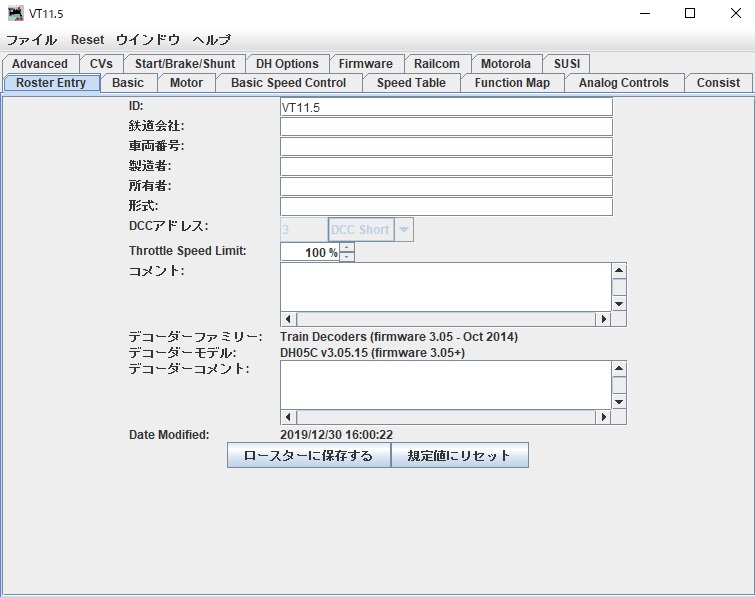
こういうタブがたくさん並んだ画面が開きます。
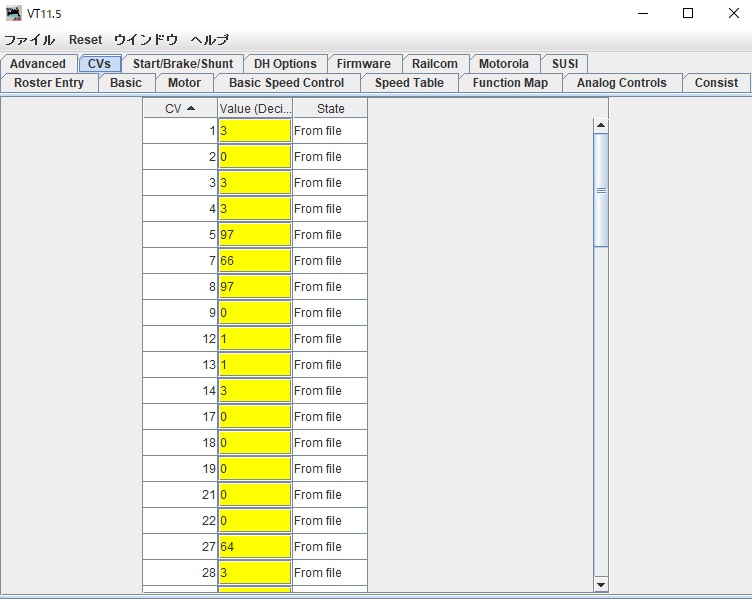
CVの番号で1個ずつ書き換えたり、現在の値を読み込んだりも基本的にできます。
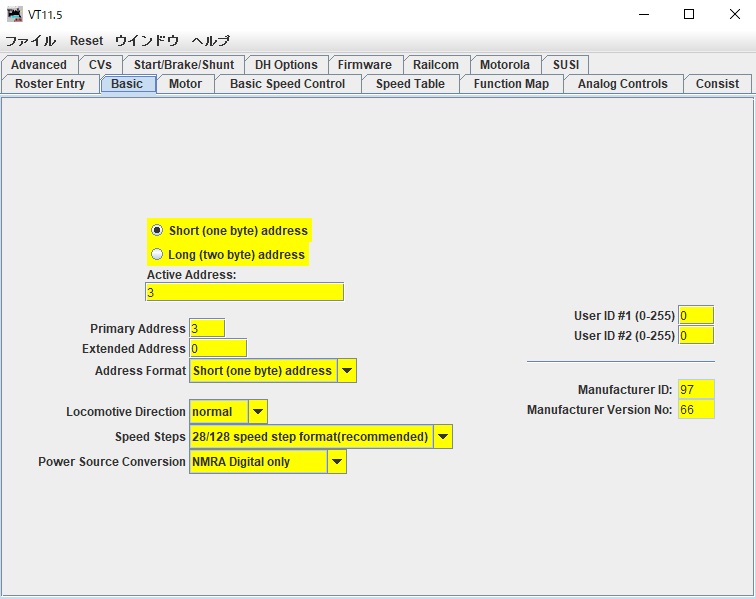
便利なのは、CVの値設定がわからなくてもそれぞれの機能別に選択するだけで書き換えることは出来る点ですね。この画面はアドレスとかスピードステップ設定。
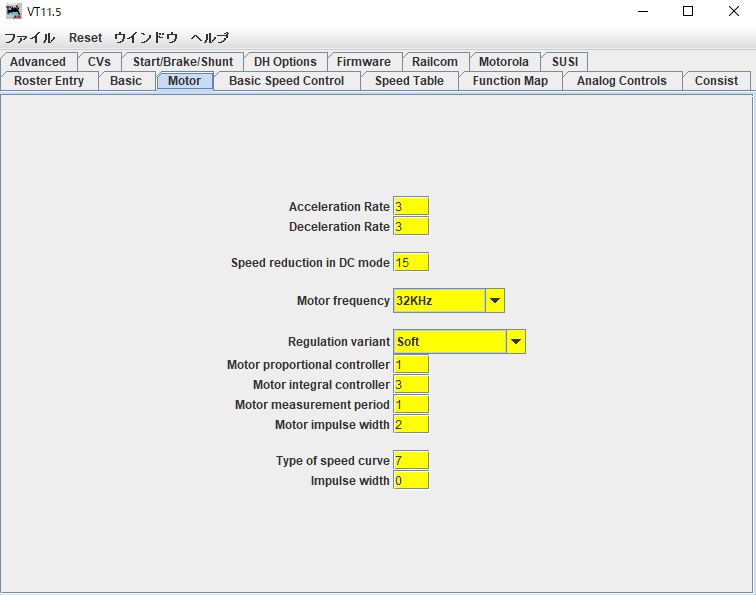
加速率、減速率やモーター関連の設定です。その昔(今もあるのかな?)アナログだとトランジスタパワーパックというのがあって、トランスからボリューム(レオスタットとか)で直接制御するよりもトランジスタで制御すれば、時間的に遅延が発生するのでスロットルを一気に上げてもじわーと加速していく様が本物っぽいって時代がありました。DCCだとこの加速率や減速率を設定すれば同じようにスロットルの反応よりも遅く車両が動作するので、重い車両が動き出すような感覚が味わえます。ただし、あまり大きな値にするとすぐ停まらないのでオーバーランしないよう注意ですね!
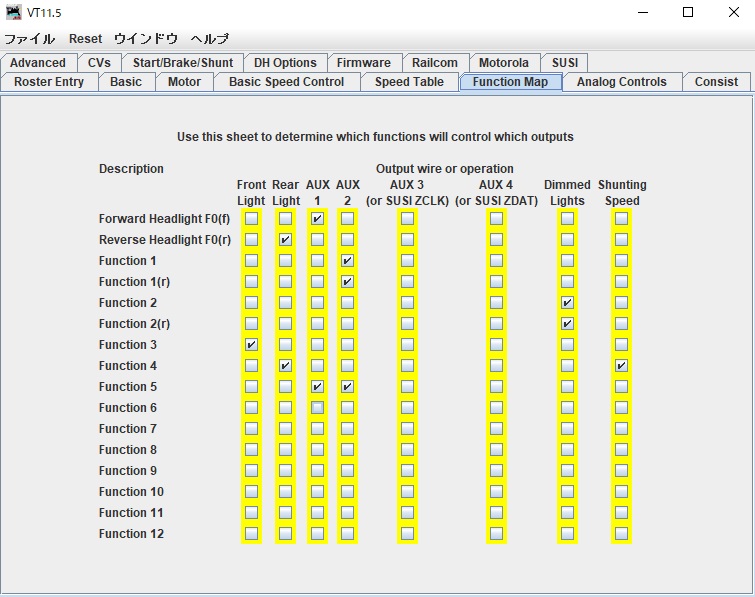
よくわからないファンクション部分も一覧で設定が可能です。
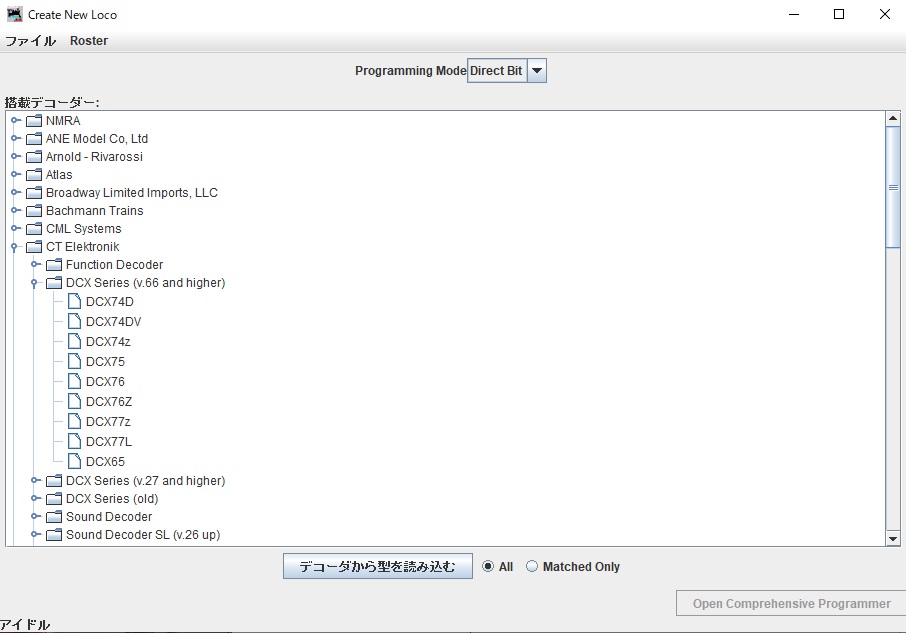
当然ながら、デコーダー各社で設定が違うので新規作成時はデコーダーを選択してパラメータを設定出来ます。実際にデコーダー(機関車)を接続して、デコーダーの種類を読み込ませることが出来て便利です。例えば、Velmo製はリストに出てきませんが読み込ませるとD&H DH10Cと出てきます。欧米系のデコーダーばかりですが、かなりマイナーなものも出てきます。日本製やDIY系は出てきませんので、NMRA標準みたいな設定で書き換えることは可能ですが、JMRI使う意味があるのかは不明です。私は、欧州製がメインですので困りませんけど
■自動運転への道(Rocrail編)
いろいろ探しているうちに見つけたのがRocrail。ドイツがメインでプロジェクトを進めているみたいですが、こちらもフリーソフト。
Webサイトにステップバイステップとかマニュアルが充実しており、仮想コマンドステーションでソフトだけで動作させてみることも出来て面白いです。欧州中心で進めてますので、スケジュールを利用した自動運転が可能ですし、設定だけでプログラミングは必要ありません。
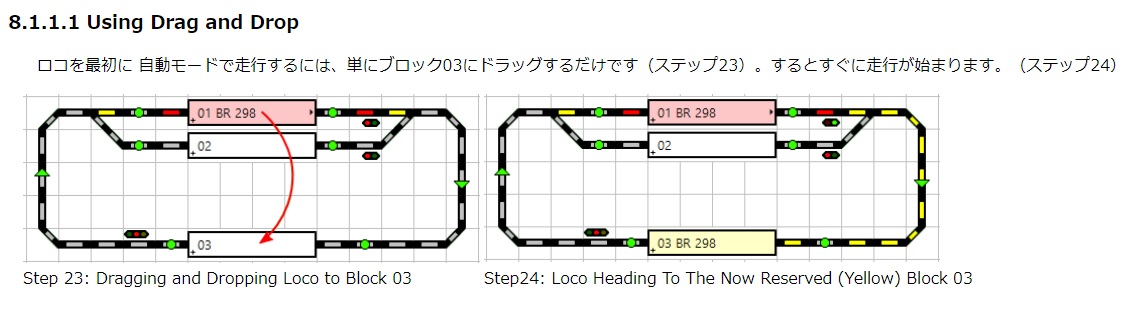
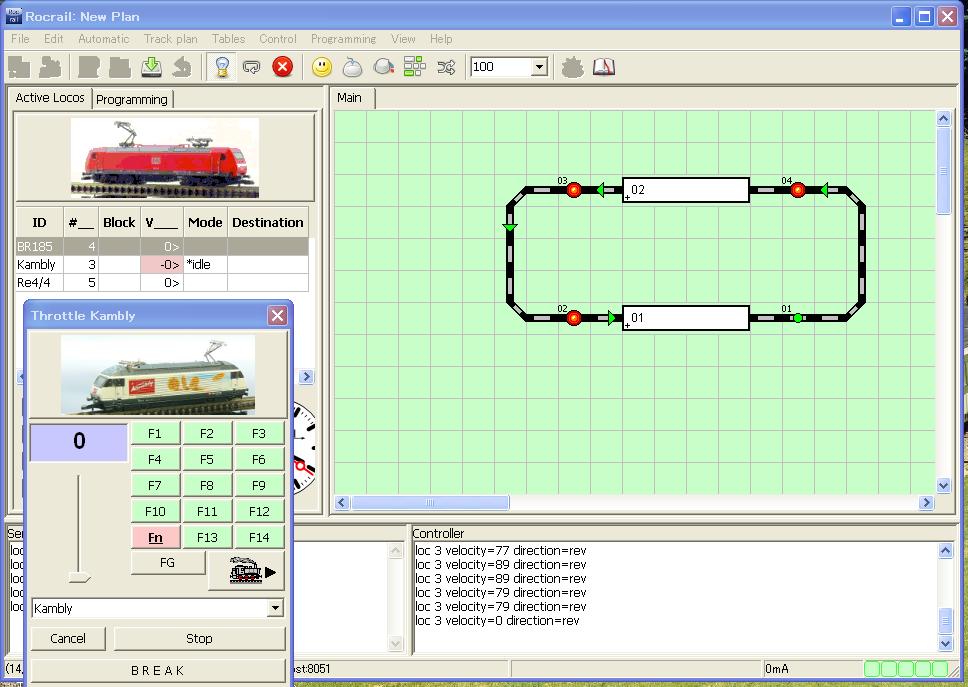
ステップバイステップの一部です。今時なのでChromeとかブラウザで見れば日本語への変換も勝手にやってくれるので読みやすいかと思います。マウスでドラッグ&ドロップしてますが、これで車両が下のブロックまで走行します。これが第一歩ですね。
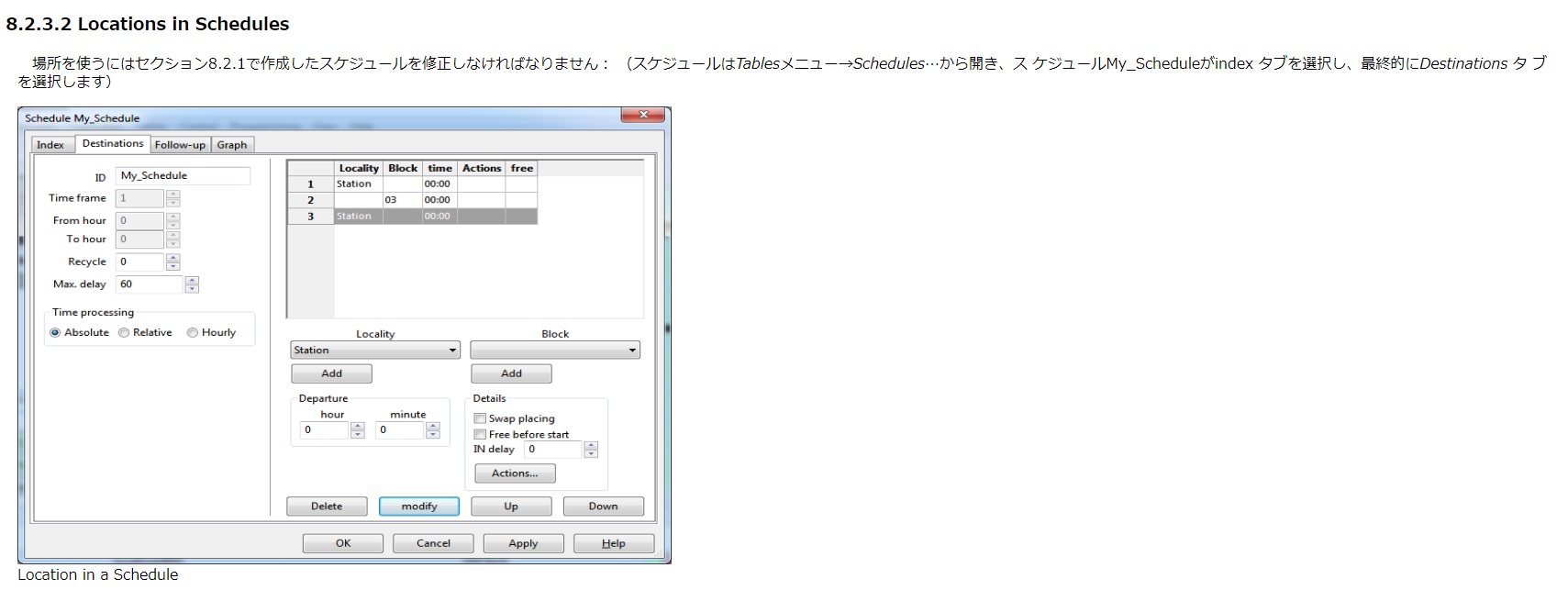
こういうスケジューラでどこのブロックを通過して走行するかのリストを作って、自動運転が可能です。途中を省略しても自動で空きルートを検索するみたいですが、それはまだやったことありません。私の頭が固いのか、理解力が乏しいのかこのスケジュールを利用した走行を行わないとエンドレス1周すら出来ないのにしばらく悩みました(笑)前述のドラッグ&ドロップでは走行できたものの、簡単なエンドレスでどうやって1周するんだろう?と。ステーション1->ブロック3->ステーション1みたいに書けばいいだけでした。
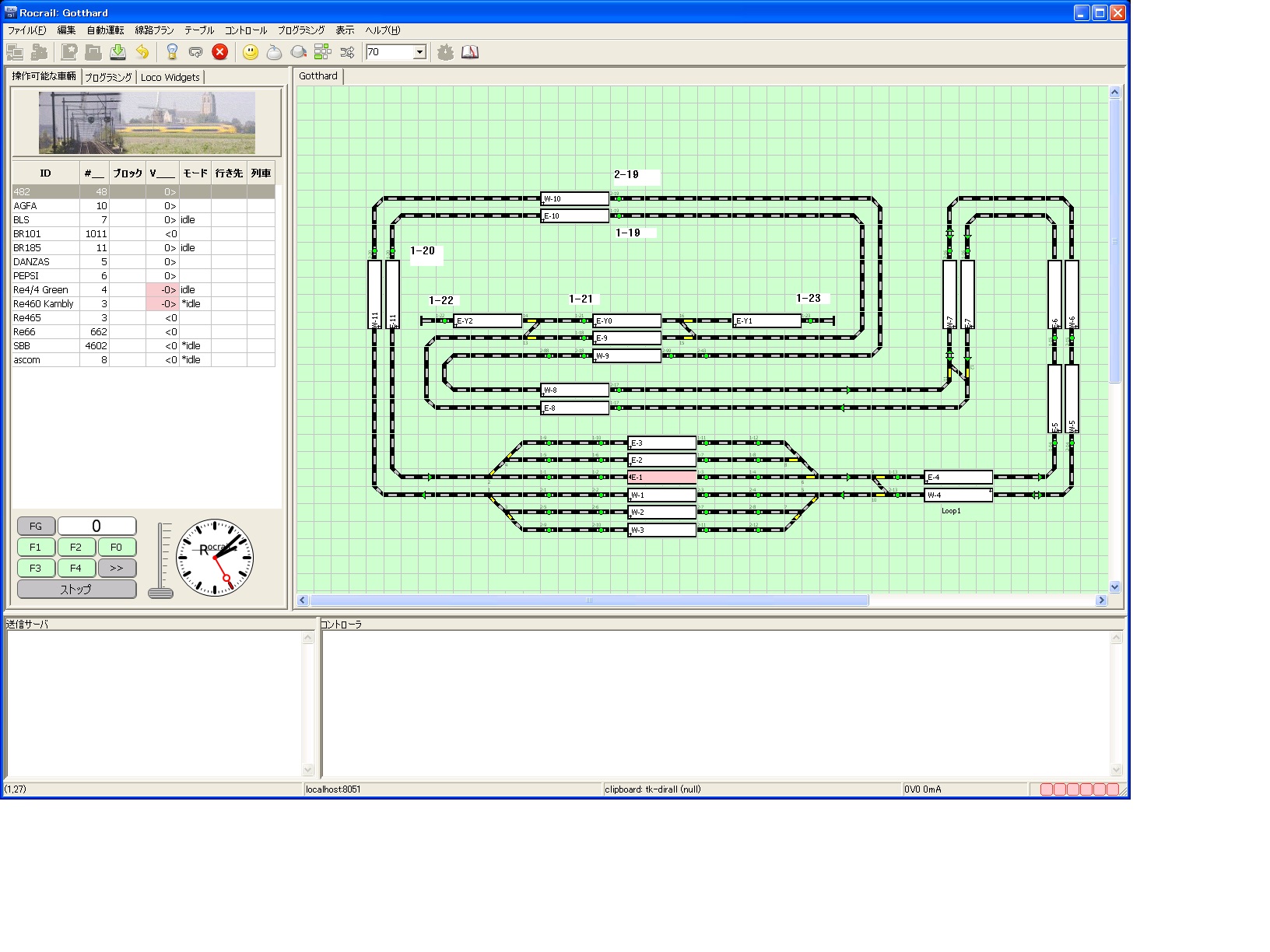
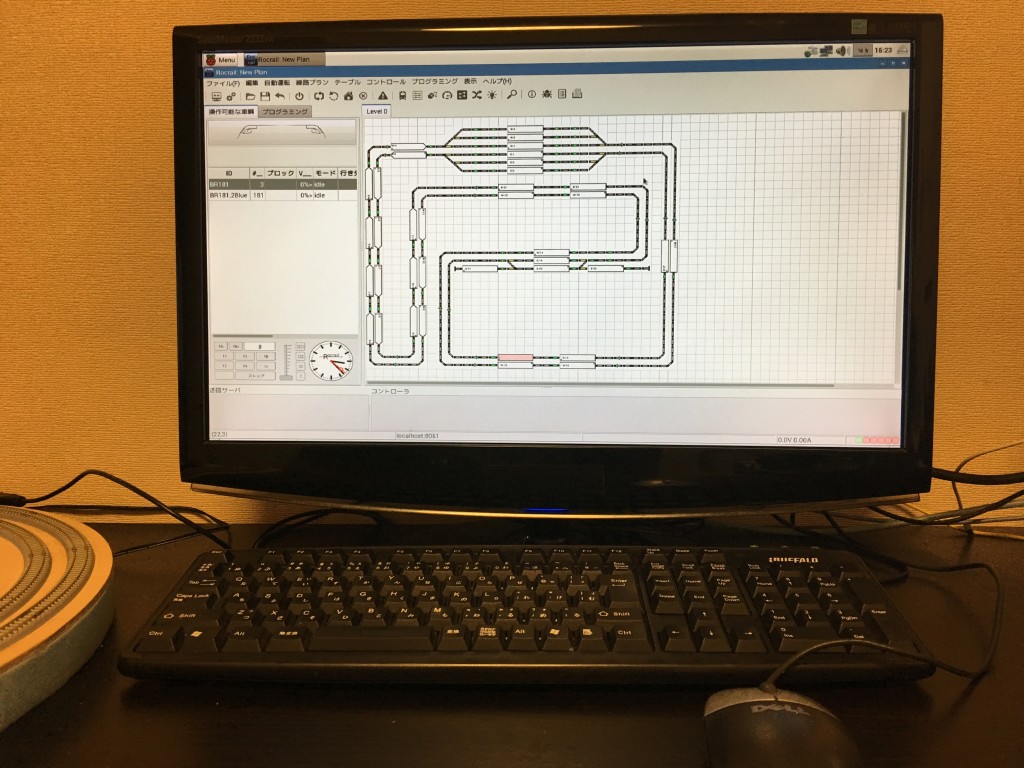
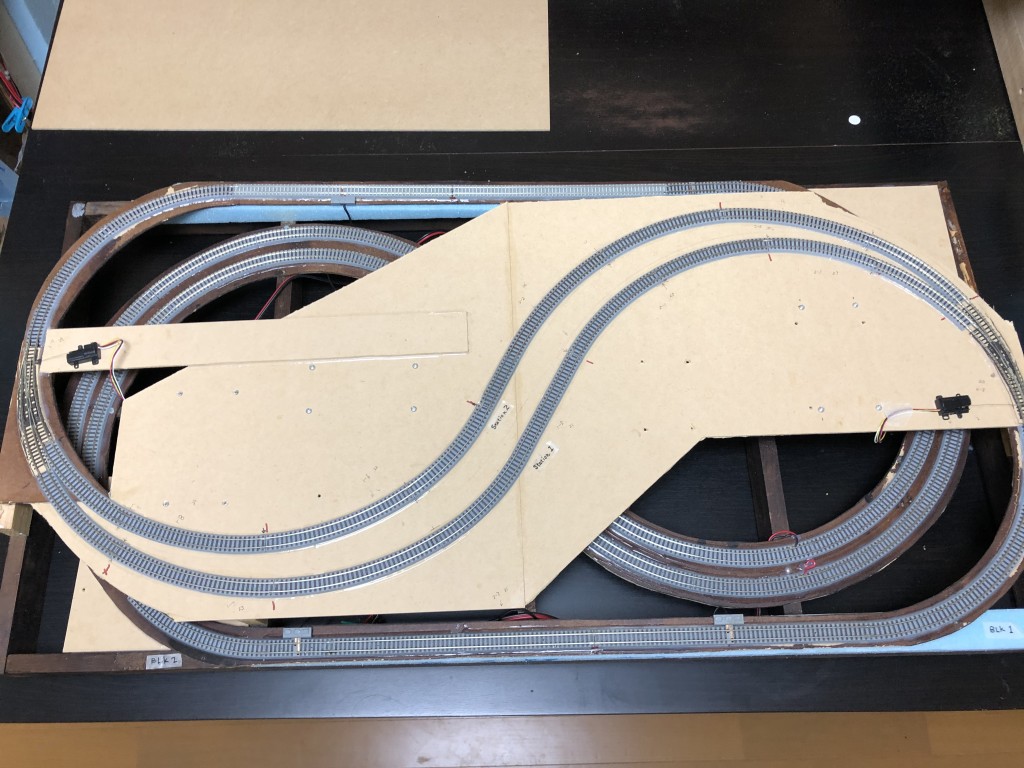
ちょっと古い画面ですが、初期の頃のGotthardレイアウトの全体象です。のちにループ部分が拡張されたりして、ブロックも増えてますがソフト側の絵としてはループを書く必要はなくて、ブロックを追加して接続するだけです。ループ状に書けなくはないですが、あまり意味がなくて、画面更新が遅くなるだけなのでシンプルな構成になるようにした方がいいです。
JMRIがJavaでプラットフォームを選ばないのに対して、RocrailはC言語で書かれてますがMac、Linuxも対応しています。RaspberryPiに入れて動作させることも容易ですので、専用PCを買うよりも安くていいかも。

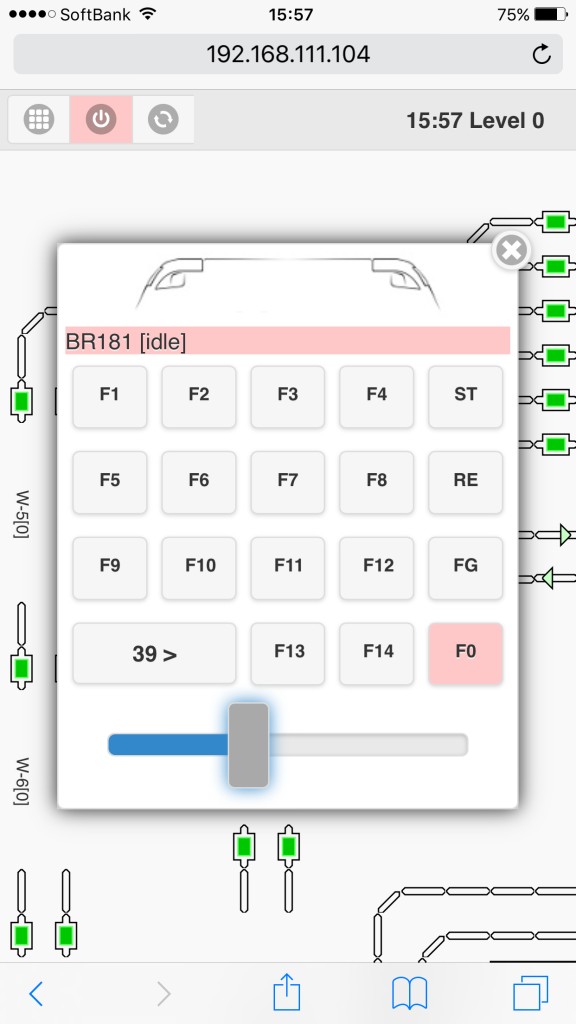
分かりにくいですけど、液晶画面の裏側に固定している状態です。右のようなスマホからも当然制御が出来ます。ちょっと初代のRaspberryPiだと動作が重くて、不具合というよりは人間がイライラします(笑)最新版のRaspberryPiならもっと快適なんでしょう(未検証)
Rocrailの良さは、ドキュメントの充実と分かりやすさ(複雑な設定も出来ますが)でしょうね。難点は日本で使っている人が見つからない(笑)レイアウトを持っている->DCCやっている->自動運転やってる・・の順番で絞り込まれて来ますから、その先でRocrailを選択している人が日本では皆無なのかも。。Rocrailのフォーラムを検索すれば、トラブル対応も大体わかりますけども、簡単な使い方やアイデアみたいなのは日本語で交流できるといいですね。
■自動運転への道(Railroad & Co.編)
Freiwald Softwareは2026年6月末に事業停止だそうです。

Freiwald Softwareという会社(ドイツ)が出しているRailroad & Co.という製品ファミリーです。こちらは商用版でかなり高価ですが、日本でも使っている人がいるようで欧州ではメジャーっぽい。Rocrailで十分ですけども、商用版はどう違うのかを確かめてみたいと思いました。
30日間の無償ソフトもあるのですけども、15分で接続が切れるとか制約あり過ぎてイライラです。Bronze、Silver、Goldの3種類があってGoldが最上位ではあるんですが、$649とお試しにはちょっと高価過ぎますね。そもそも3種類の違いがWebサイトではわからず、それぞれの制約とか一覧で書いて欲しいものです。

とりあえず、Bronzeという一番安い(といっても$139)を発注するとUSBのロック解除のキーが郵便(笑)で送られてきます。オンラインでキー発行とか、もうちょっとなんとかならないんですかね?送られてくるまで1週間以上とか待たないといけないですし。
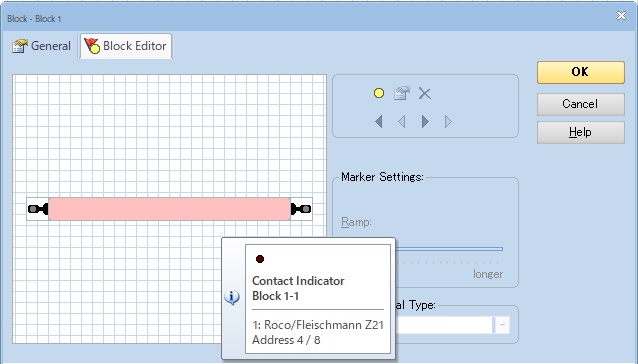
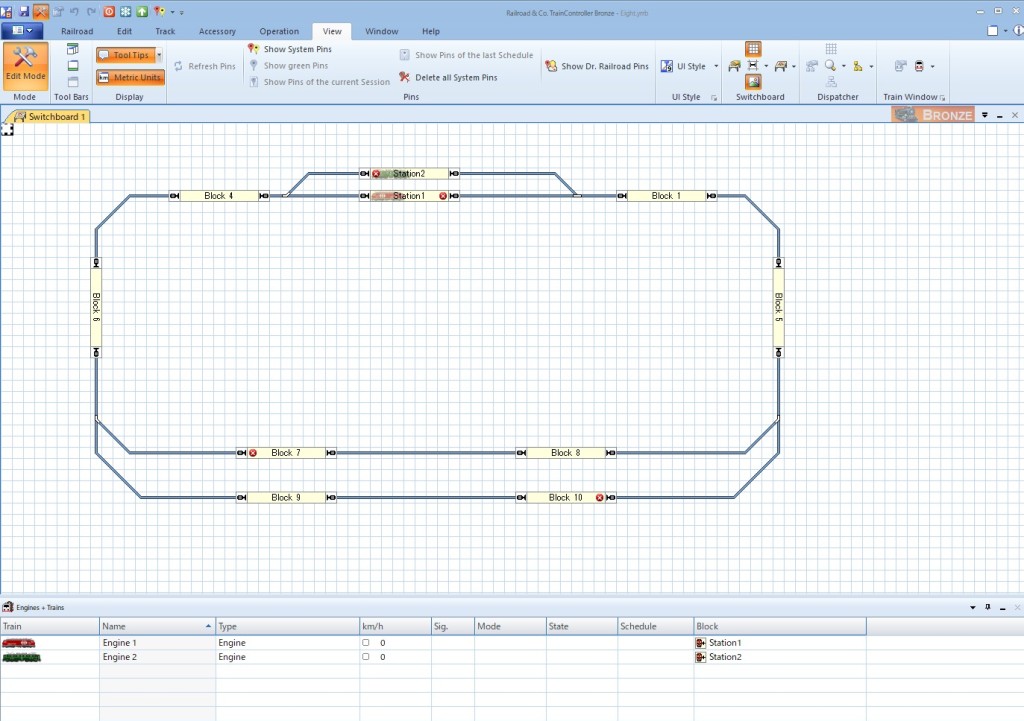
前述のレイアウト図みたいなのと、各ブロックの設定(センサーとか)を入れていくのはチュートリアルを見ながら、割と簡単に出来ました。コマンドステーションはDR5000で、Z21プロトコルに設定して、ソフト側にはZ21で設定してます。
コマンドステーションとの接続とか、センサーアドレス、ポイントアドレスの設定は、Rocrailも同様ですけども手動で設定しないといけません。その先のルート設定なんかがRocrailでは生成してとかひと手間あるんですが、さすが商用版はブロックに割り当てて列車設定すればスケジュールを作るだけ。とりあえずは走行させるところまではサクサク出来ました。
ブロック間を往復させる自動運転までは出来たのですが、スケジュールで運転させるまでには至っておらずそのまま放置してます。Bronzeの制限はどこなんでしょうね?Goldまでアップグレードは出来るみたいですけども、ポイント数制限とか列車数制限とか・・どこかに書いてあるのかもしれませんが不勉強ですいません。7万円出してもよいならば、最初からGoldにした方がいいのかもしれません。
パソコンやプログラムのエキスパートは必要ありません・・とか書いてあるので、割と簡単な操作である程度のところまでは出来るかも。まあ、ソフトの出来はいいのでそうかもしれませんが、センサーやらポイントデコーダーの設定やらそこまで辿り着くのがPC不得手だと無理なんじゃないかと思いますがどうなんでしょう?パソコンもUSBにマウス挿せば自動認識できるPlug&Playになりましたけど、DCCはそれ以前のシステムですよね。勝手に線路配置決めて自動で認識はさすがに無理でしょうけども、NOCHのCortinaとか出来合いのレイアウトにすべて組み込んで差し込んで動かすだけみたいな方がもしかするとお金持ってる人には受けるかも。最初からバラで組み立てて行くのはかなり大変ですね。
■デコーダーのプログラミング
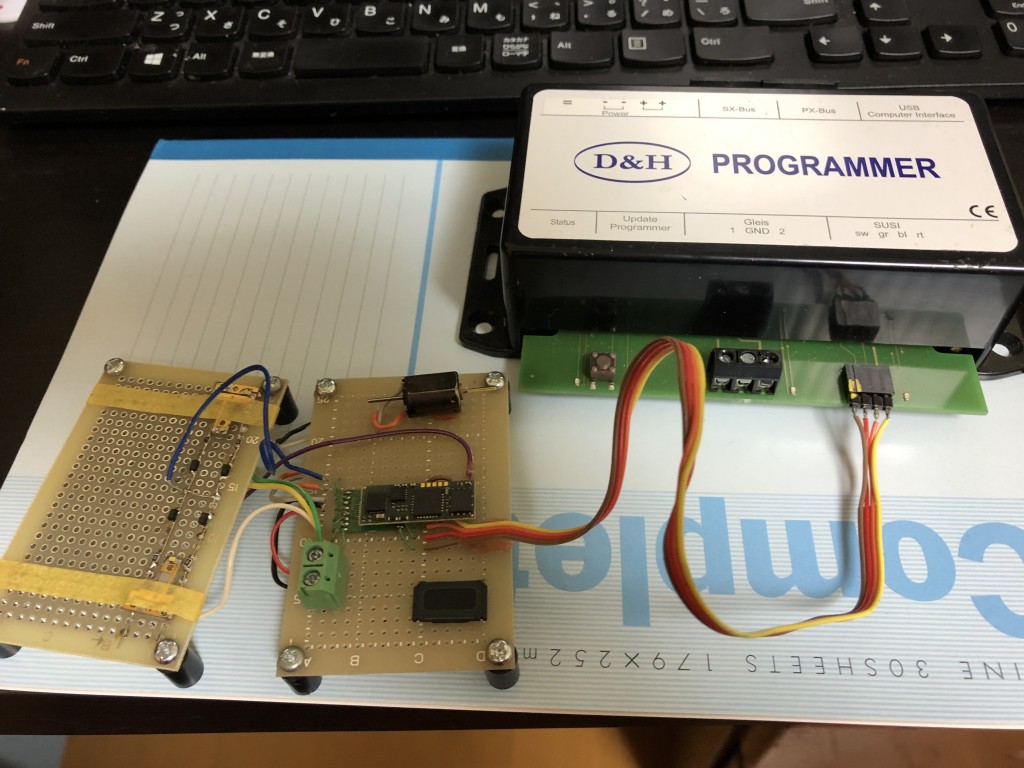
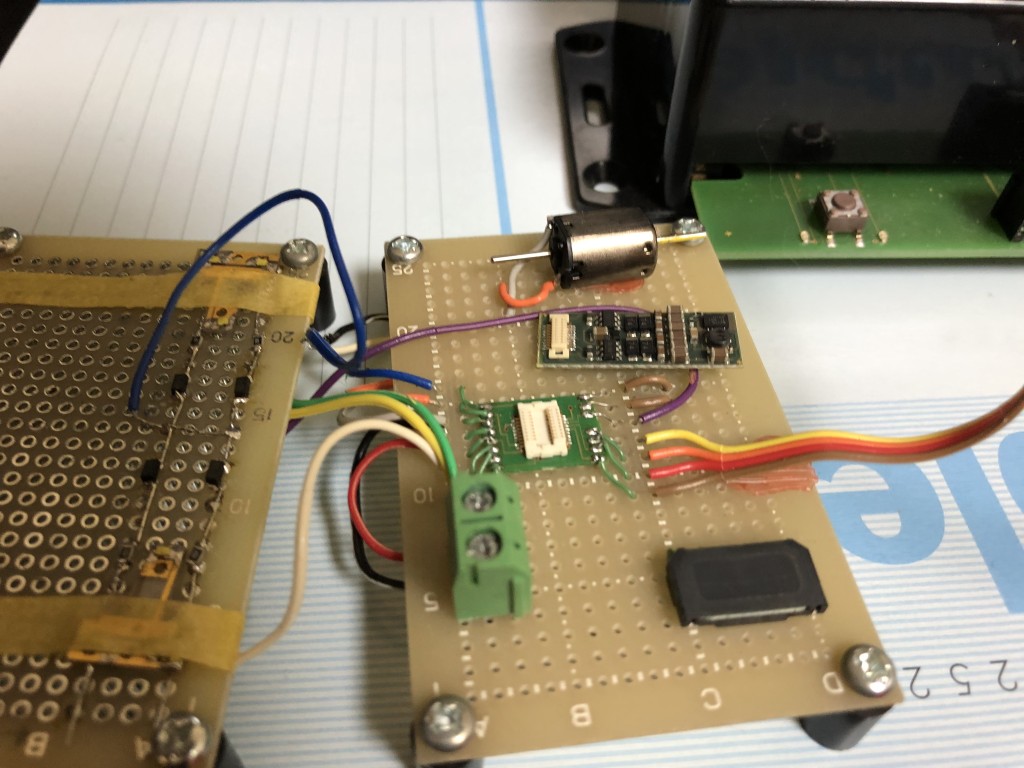
デコーダのCV値とかパラメータの変更は、コマンドステーションから出来ますがファームウェアと呼ばれている元になるソフトの書き換えですとか、サウンドデコーダーのサウンド変更なんかはメーカー独自のプログラマが必要だったりします。これもパソコンソフトが必要ですね。写真はD&Hのプログラマです。手前の基板はNext18用に作成しています。
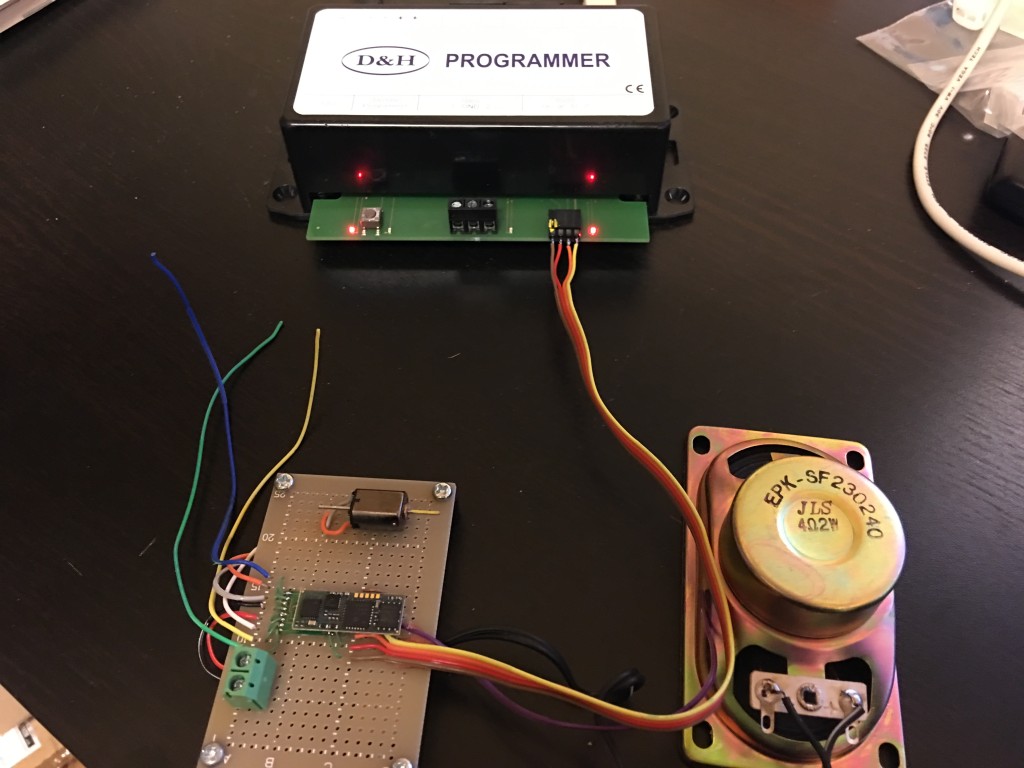
大きなスピーカー付けたり、負荷としてわざわざモーター付けたりしてますが実験みたいで意外と楽しいです(笑)サウンドデコーダーが搭載できる機種が少ないZゲージですが、サウンドそのものをディーゼルから蒸気に入れ替えたり、ファンクションボタンに割り当ててあるものを変更したり便利です。
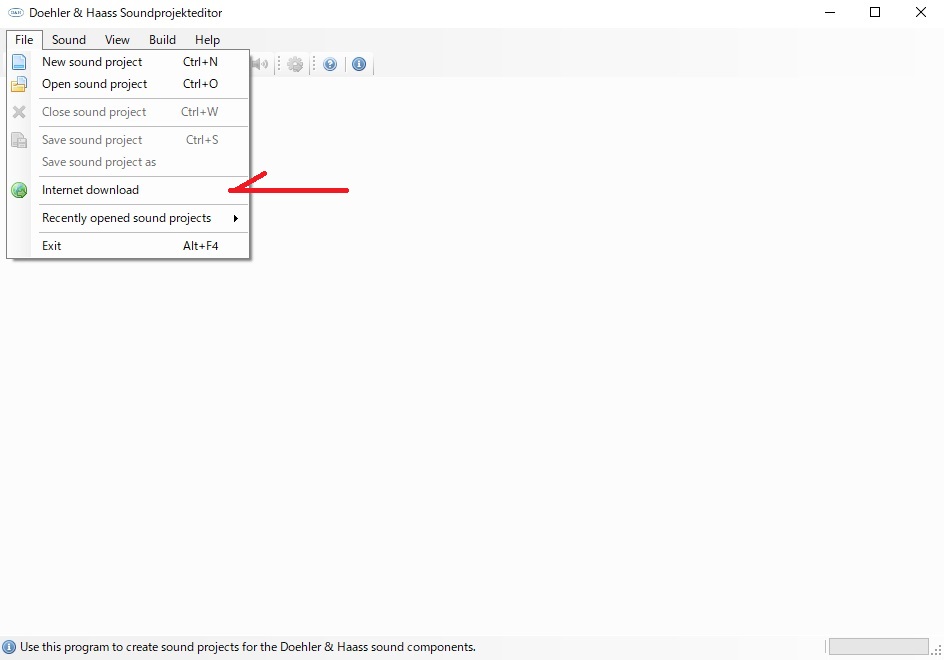
インターネットからサウンドファイルをダウンロードしてます。
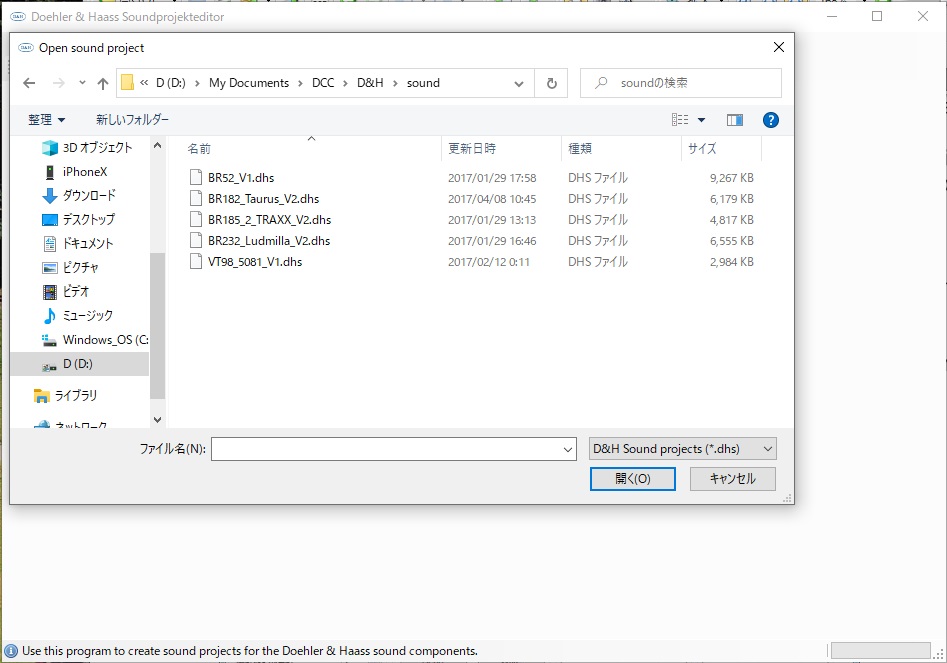
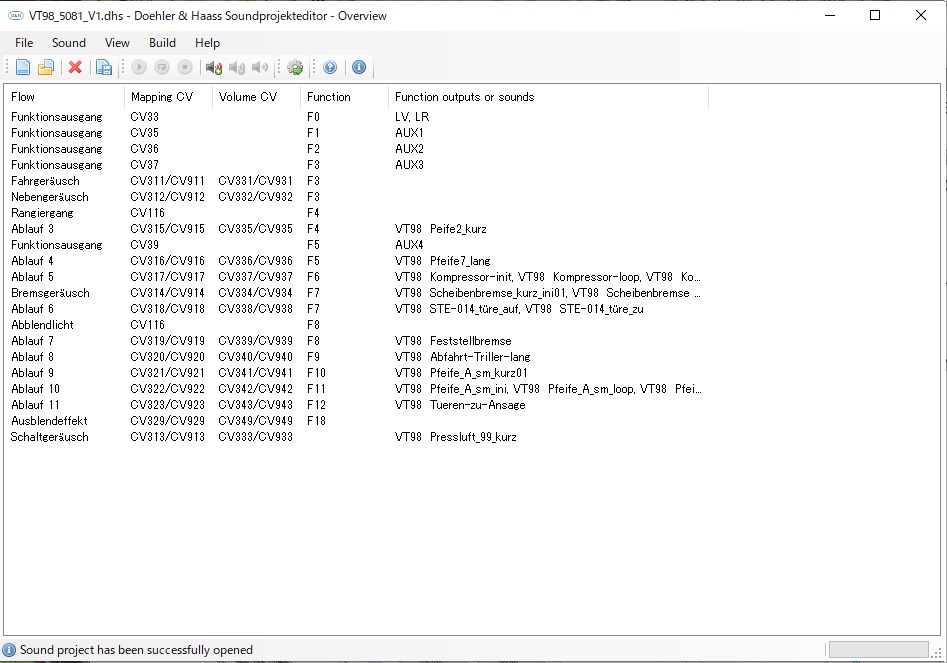
保存してあるVT98のサウンドファイルを読みだして、ファンクションの割り当てを見ているところ。
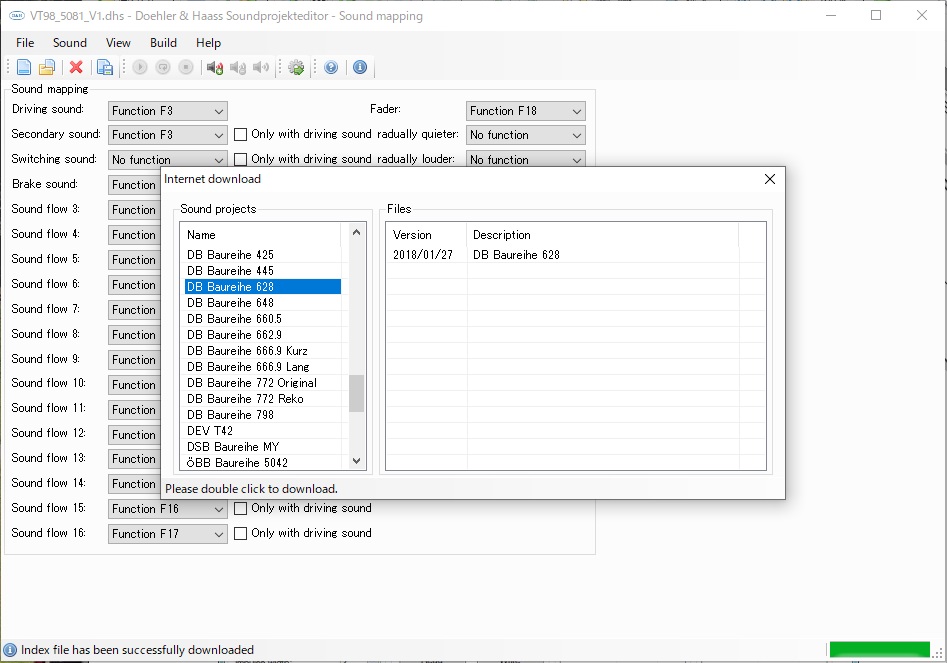
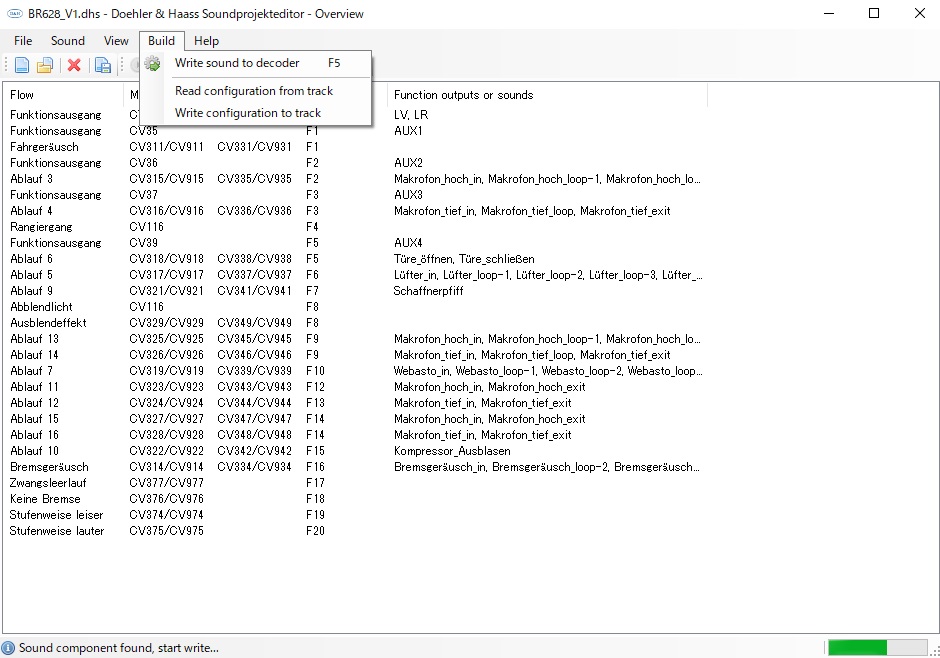
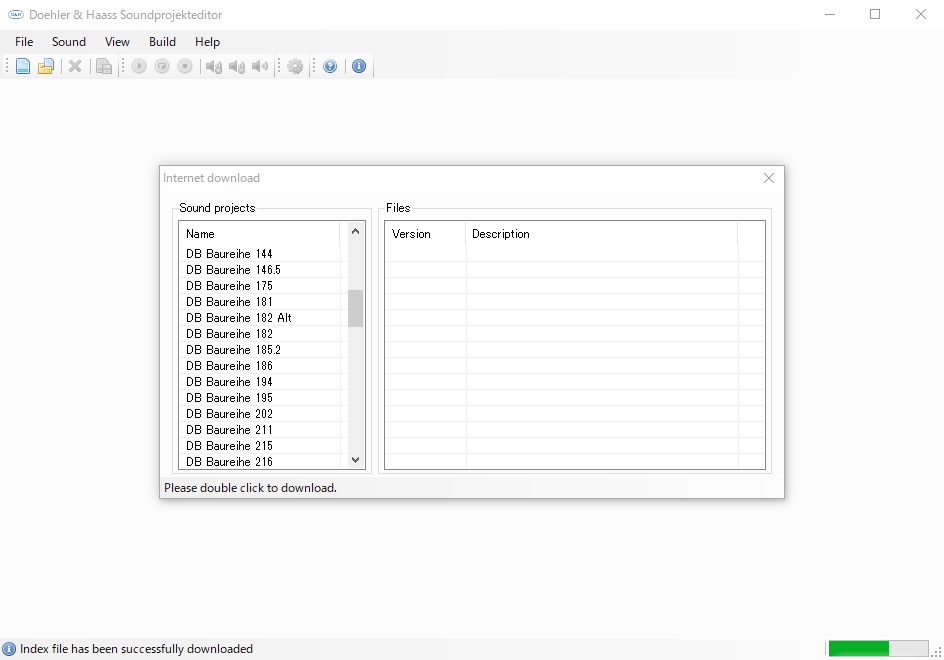
あるいは直接D&Hのサイトからサウンドファイルを選択して書き込むことも出来ます。こちらはBR628のサウンドファイル。
書き込みは2~3分掛かったりします。
他社製は見たことないのでわかりませんから、D&Hのみですがファームウェアも最新版にアップデート出来て便利ではあります。メーカーに送ってもアップしてくれるようですが、さすがにドイツに送るのは無理そうですので。普通のモーター用デコーダも対応してますが、それほどアップデートする必要があるのかというとそうでもなく(笑)
サウンドデコーダーは書き換えるなら必須なんでしょうね。自分でサウンドデータを作るってことも可能なんでしょうけど、結構大変ですね。実物のサウンドをそのまま再生しているなら簡単ですけども、例えば蒸気だとシュシュシュ・・と速度に合わせて出していく必要があるので、「シュ」という単独で登録して・・・とか、それを3気筒、4気筒とか違えていくのはどうするんだろう?とか疑問は一杯ありますが、それはそれで別の趣味として成り立ちそうです。
コメント
かがみさんのおかげでDCCを始めることが出来感謝しております。
しかし、このページの自動運転の項目あたりからだんだんついていけなくなってきました。
お酒だけご一緒できればと思います。
わかってしまうと大したことないかもしれませんよ。これからもよろしくお付き合いください。