フォーラムへの返信
-
投稿者投稿
-
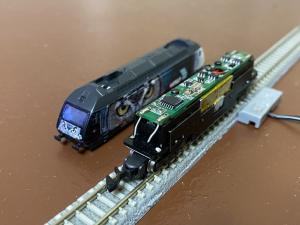
Re460は後、4両くらいで完了なんですが、かなり苦戦中です。DEP1でアナログ運転を確認してもデコーダーで走りがおかしかったり、ギア鳴りがひどくなるものがあって修正中です。写真は、たぶん手持ちのRe460でも最後に買ったものだと思います。これはなんとかうまく走るようになりました。
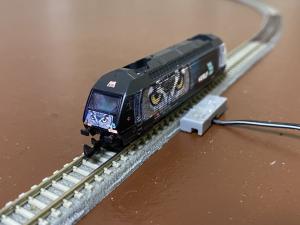

高輝度電球色LEDになっていて明るく光ります。

ちょっと曲者なのは、LED基板が新しくなっていて極性が従来のものと逆になってます。しばらく悩みましたが、DE29デコーダの設定でなんとかなりました。
oceanさん
そうですね。純正のウォームギアの方がよさそうです。
シャフトが短いRe4/4は割と調子よく仕上がってます。
oceanさん
ロクハン付属のウォームだと真鍮なので曲がっていてブレたりもします。

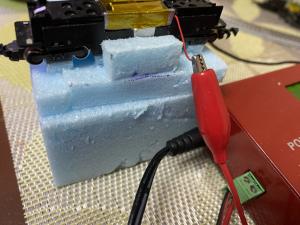
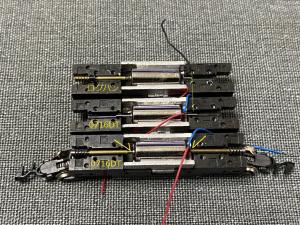
適当にスタイロフォームで作っているので汚いんですけども、こんな台に載せてDEP1でアナログ状態のまま電流値とギア鳴りを確認してます。ウォームギアはギア鳴りしないはずなので、ガリガリ音が出ているとどこかおかしいんですよね。

デコーダーをネジで締め付けると微妙に位置関係が変わるので、デコーダーをねじ止めしてからDEP1で再確認してます。これでOKならそのままモーター線を半田すればよいだけなので。

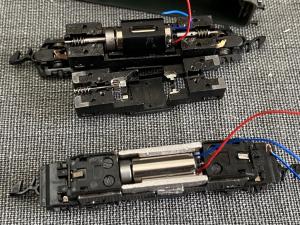
初期の改造だとロクハンモーターでモーター固定もしていない状態でした。自分で記事に軸がブレていると書いてましたが、すっかり忘れてました。
モーターホルダーで固定するとロクハンモーター軸がブレるので、マウントを削ってみたり調整してました。

ナローガレージで購入した0716DTは、今のところ単体で回してみても軸ブレは無いです。どちらも中華製なのでしょうけども、ロクハンは検品していないのかそれともユニバーサルジョイント前提でブレてもいいと判断なのか・・モーターマウントを付ける方法だと0716DTの方が良さそうです。あとは回転数が違うとかウォームギアが0816DTは附属していないとかありますが。。
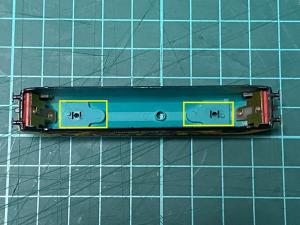
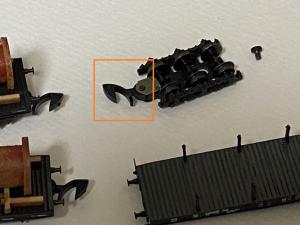
Re460は黄色枠の辺りがデコーダーに当たるようです。

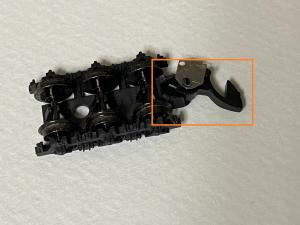
思い切ってパンタの底面部分を切り取ってプラ板で塞ぐという方法も・・

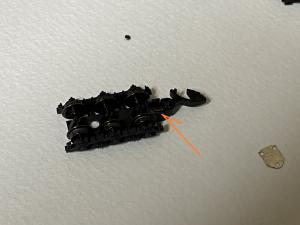
これくらいまでヤスリの先端で削ると大丈夫になりました。
Hello sebek1974,
good job. Maus V1 Prototype dummy turret.
oceanさん
そうなんですよね。0.2mm薄ければ当たらないかも。
残りの車両もパンタ下を削ってみます。パンタも共通パーツなので仕方ないですけども、もうちょっと小さければいいですね。
oceanさん
こちらこそご無沙汰しております。
確かにパンタ下が飛び出してますよね。私も4両くらいは裏を削ってプラ板貼ってます。張り替えた車体だとそこそこ大丈夫ですね。
デコーダーもVelmoとかDigitraxだと基板が薄いので、当たる量が少ない感じです。DE25/29はVelmo、Digitraxよりも基板が厚いので面倒です。元々は試作段階で薄い基板だったのですが、5極モーターの状態でツメにパチンとハマるようにメルクリン基板と同じ厚さにした経緯があります。コアレス化するとは想像もしてなかったですね。
とりとんさん
モーターのリード線が外まで半田が流れていてその部分が折れているように見えます。今時はどれも中華製なんでしょうけども、品質悪いですね。

こんな感じでVT11.5に搭載している途中でした。ロクハンモーターでも走行に問題はないんですが、Velmoデコーダーが歪んでしまうのが問題でちょうどモーター部分との境にマイコンチップがあるのですよ。

モーターマウントはプラで作ってましたが、Uアロイ製を適当に切って入れてます。

ボタン電池のLR41だとちょうど良さそうなサイズなんですが、このサイズだと電池ケースが無くて自作で悩み中です。2個並列にすれば少し長い時間点灯できそうですが、1.5Vなので昇圧回路が必要です。車体の左側に入っているのがAmazonで100円しない価格で売っている昇圧回路。1.5V->5Vになります。これにON/OFFさせるホールICを接続すればいいだけなんですが、電池の固定がどうもうまくいかず。LEDは秋月のチップLED変換基板をそのまま真鍮線へ半田すれば良さそうです。
とりとんさん
E288467です。
真ん中あたりが高くなるのはコアレス搭載機と同じです。前後に0.8mmのプラ板を挟んでいます。車体天井にデコーダー(DE29)が当たるので、パンタのねじは交換して、デコーダーのコンデンサも小さいものに載せ替えしました。
とりとんさん
確かに0.4mmだと誤差程度になりますね。H0でも1mmって書いてあるのでこれも誤差程度でしょうね。
とりとんさん
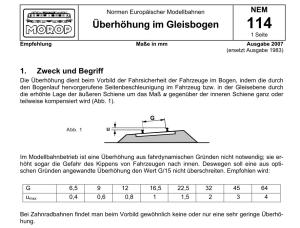
スムーズに走ることと見栄えも良くなることで緩和曲線はいいですね。

欧州の規格団体ではMOROPのNEM113で寸法が出てます。お奨めって書いてあるので、必須ではないにしても参考となる資料があるのはいいですね。ちなみにNEM114にはカントの規格になっていて、鉄道模型にカントは必要ないけども見た目として付ける場合にはゲージの1/15を超えないようにと書いてあります。Zだと0.4mmなので効果があるのかわかりませんが。未見ですが、ロクハンのカント付きレールはそれぐらいなのか気になります。


Re4/4もDCC化してるあるのですが、確かこれだけヘッドライト基板の+-が逆になっている気がします。他にも確かあるんですが、どれだかわからなくなってます。デコーダーはDE29x4szrなので、CV値設定で1END、2ENDのヘッドとテールも変更できるので設定すればOKになりました。DE25だとこれが出来ないですが。
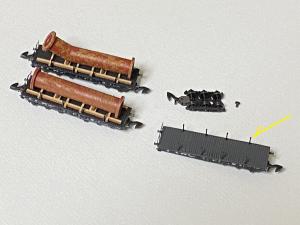
貨車の棒をようやく接着しました。この貨車セットは箱に入ったまま放置だったのですが、久々に出して来ました。右上に台車が外してありますが、線路上で連結しないなぁ・・と思っているとバネが無いようなんですね。
指で触るとグラグラしていてバネがありません。金属板をプラピン部分で溶着させて固定しているタイプなので、分解できませんからもしかして製造時からなかったのかもしれません。
仕方がないので、プラピン部分をカッターで削いで開けてみるとやっぱりバネは無いですね。
予備パーツからバネを探してきて入れてます。金属板は仕方がないので瞬間接着剤で固定しました。
棒を固定するだけがいろいろ余計な作業が追加してしまいました。。
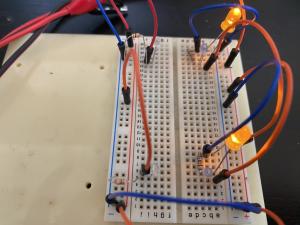
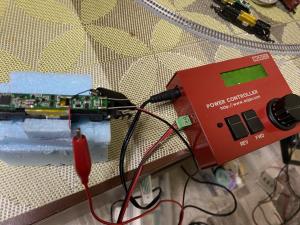
せっかくなので、2個並べて配置しました。
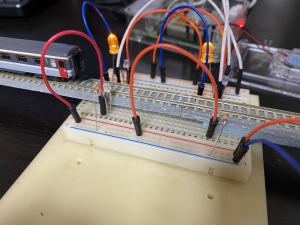
センサーの間に線路を置いて、そこを車両が通過すれば時間測定が出来るはずです。

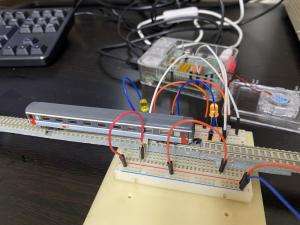
PICマイコンとかで作ろうと思いましたが、アセンブラを忘れているのと最近の開発ソフトをダウンロードするとアセンブラが入って無い・・なんでもC言語で開発しろってことでしょうか? 簡単に実験するだけならラズパイの方がすぐ出来そうなのと仕事用に使っていたものが3台余っていたのでこれを流用です。GPIOのところに接続してソフト作ればOKなはず。。

赤外発光ダイオードは別電源から供給してます。
左方向から進入しているところです。左側の黄色いLEDが消灯しているので、センサーの信号が0になっているはずです。右側の方まで進めると右のLEDも消灯しますので、こちらのセンサーも0になるはず・・

簡単そうだったのでPythonで初めて書いてみましたが、意外と苦戦しました。
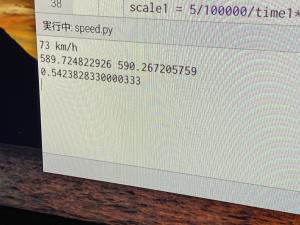
デバッグ中なのでいろんな数字が出てますが、5cmの間を0.54秒で通過しているので73km/h・・・合ってるのかな?
-
投稿者投稿