2019.4.29
Spur Z Car Systemを入手しまして、レイアウトに組み込めないものかと試行錯誤しておりました。道路は作成中だったので、それに磁気テープを貼り付けていけば周回できるようにはなるのですが、あまり面白くありません。
Spur Z Car Systemについてはこちらの記事で。
スイス風レイアウトということで、やはりバスはPOST BUS(PTT BUS)カラーにしたいとか要望はありますがどんなシーンにするか?
Youtubeで検索しておりますと、以下のような動画がありました。
2分くらいとところに狭い山道のすれ違い風景があります。狭い道もフルサイズ?のバスで通行するんですね。。3つのトーンで構成されるPost hornも特徴的です。この音を聞けば対向車としてバスが来る!ってわかるんでしょうね。ほぼ1台分の幅しかない道なので、待避所で待つタイミングをこれで取ることができるような感じです。動画は戻ってくるバージョンもありますので探してみてください。
ちなみにホーンの音源はPTTバスのWebサイトでダウンロードができます。こちら。


TOMIXのバスコレ(1/160)のPTTバスです。Zのバスに比べて大きいですが、黄色いバスいいですねぇ。こんな仕上がりになるかどうかは別として、黄色の塗装にはしたいところです。
パネル製作
とりあえず、山岳地の道路でのすれ違いシーンを再現しようということで、パネルを作成します。
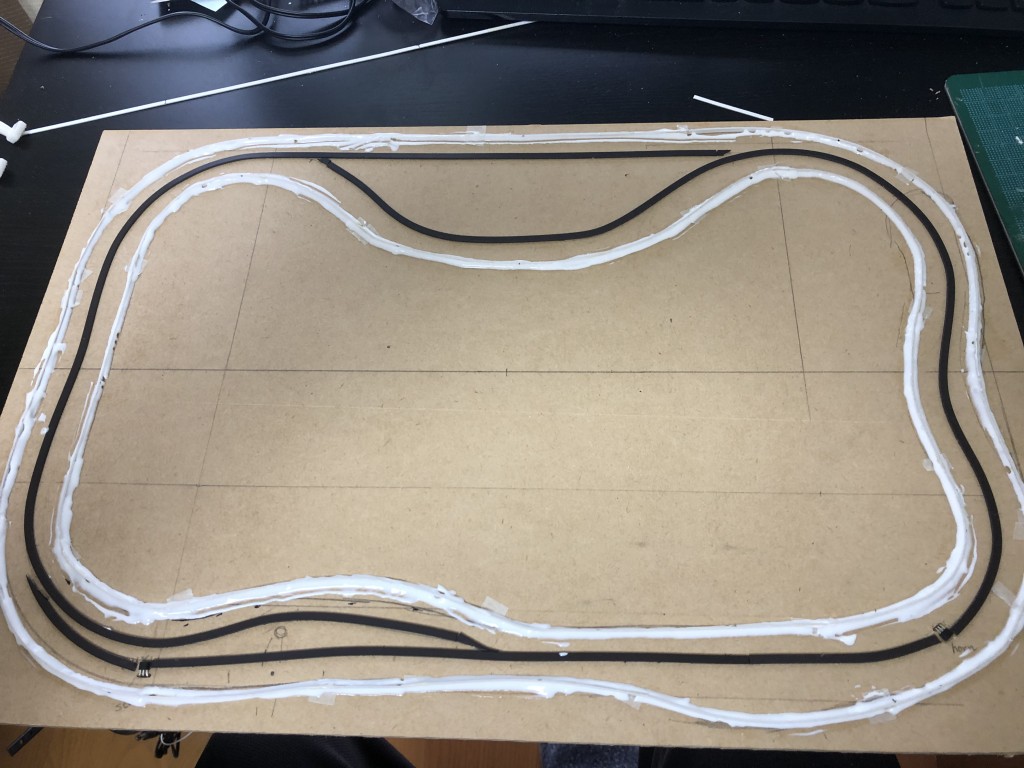
MDFボードの大きさはA3くらいです。2台の車が反対方向に周回する予定。すれ違いの2か所は方向を変更する必要がありますが、電磁石やサーボを使った大規模なものも考えましたが、実験してみたら写真のようなゴム磁石に切れ込みを入れるだけで毎回同じ方向に分岐するのであれば十分なことがわかりました。一瞬、反対方向で舵が切られるような挙動はありますが割と安定しています。走行ラインに沿ってゴム磁石を貼り付けて、道路部分はモデリングペーストでいいか!ということで縁取りに紙を貼り付けているところです。
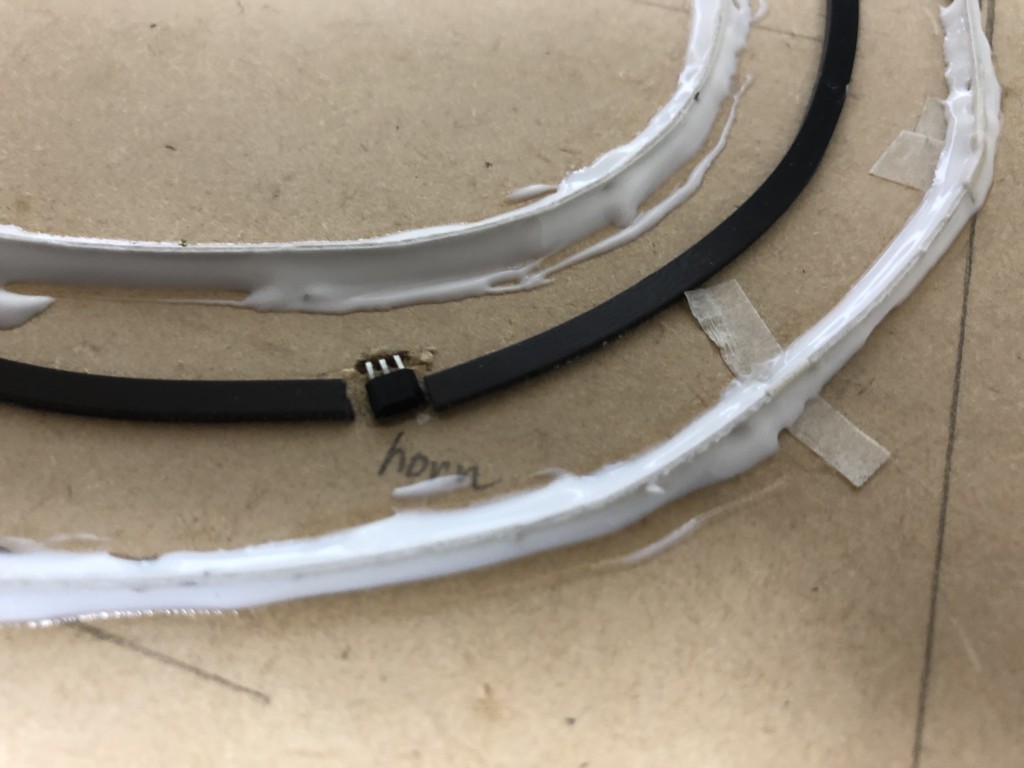

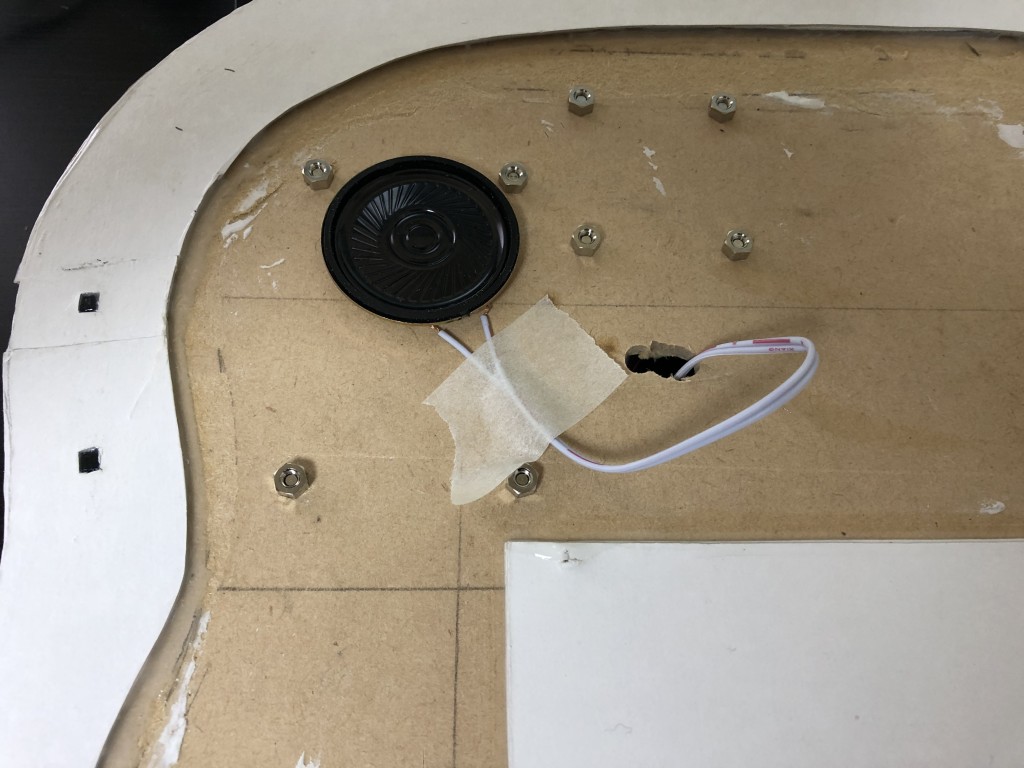
位置検出用にホール素子(磁気に反応する素子)を固定しています。
こちら側は裏になって見えなくする予定ですが、所定の位置で停めるようにサーボを設置予定。。と、ここまでは順調そうだったのですが、モデリングペーストでの表面仕上げが思ったより大変で、サスペンションもない模型ですので平滑に仕上げるのが難しく、ここで断念。

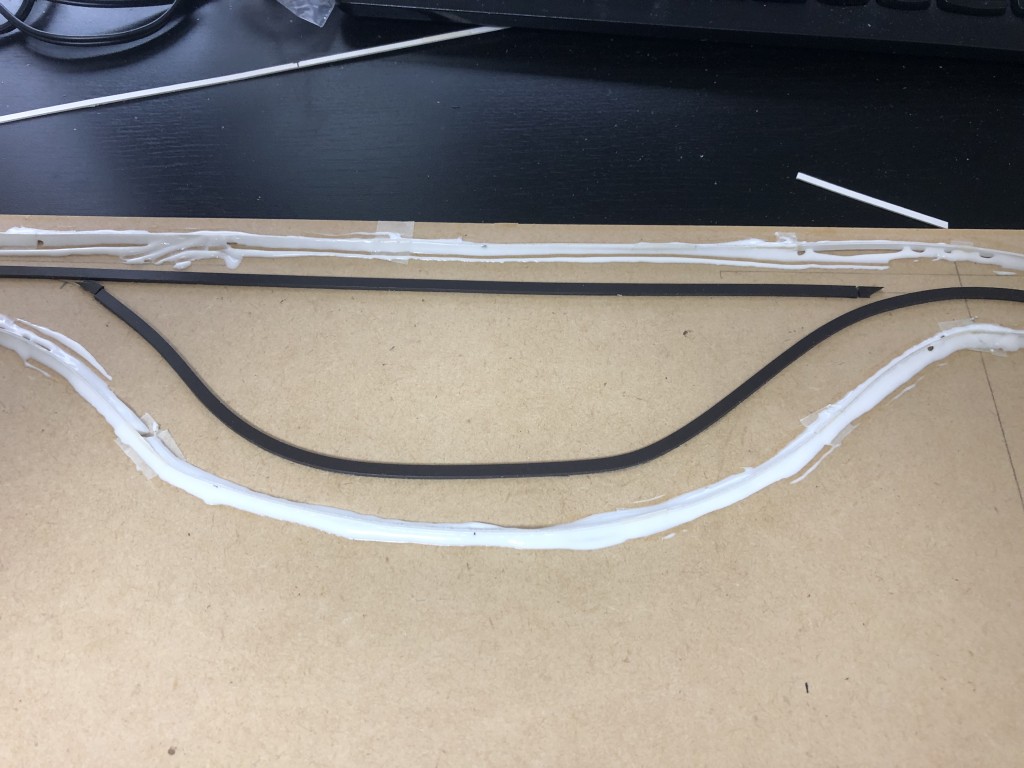
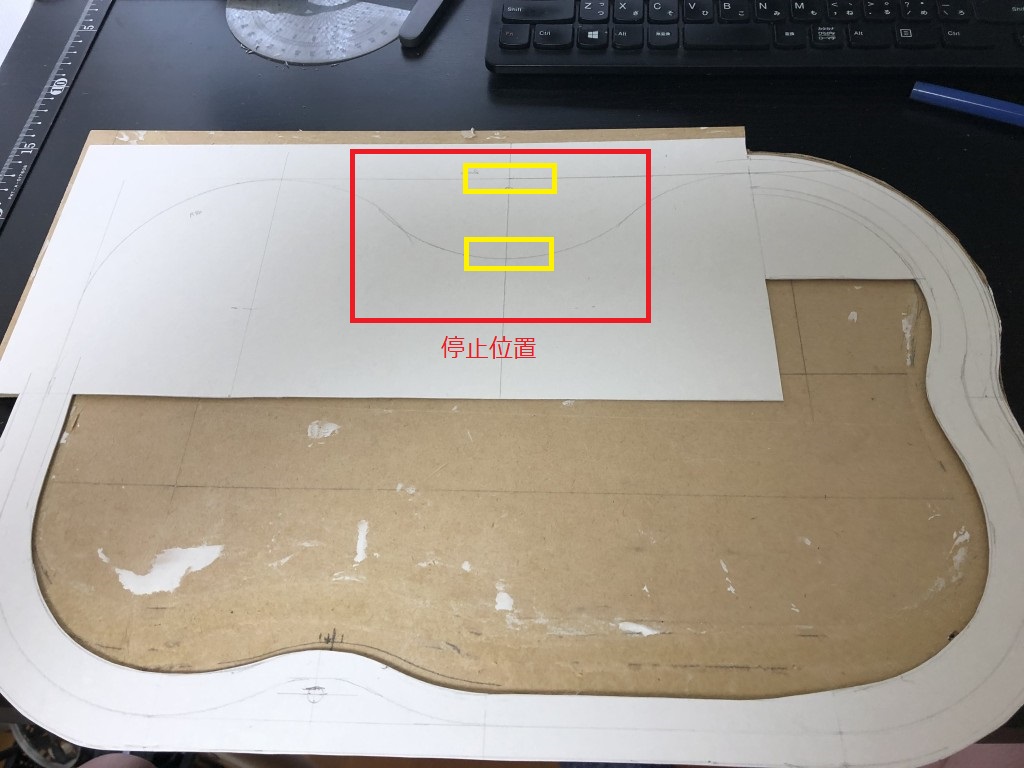
やっぱり考え直して、ボール紙の下にゴム磁石を貼り付ける方式に変更です。左が裏面、右が表です。右写真の手前半分だけが見える形にします。左下の方に見えるのが待避所のつもりです。
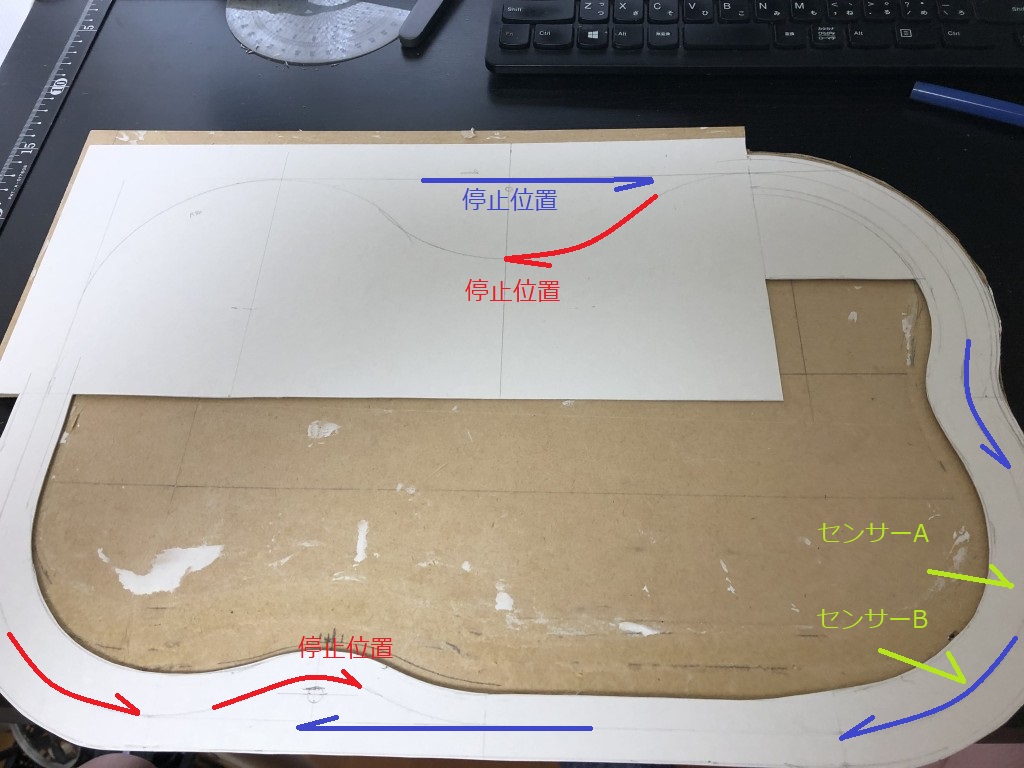
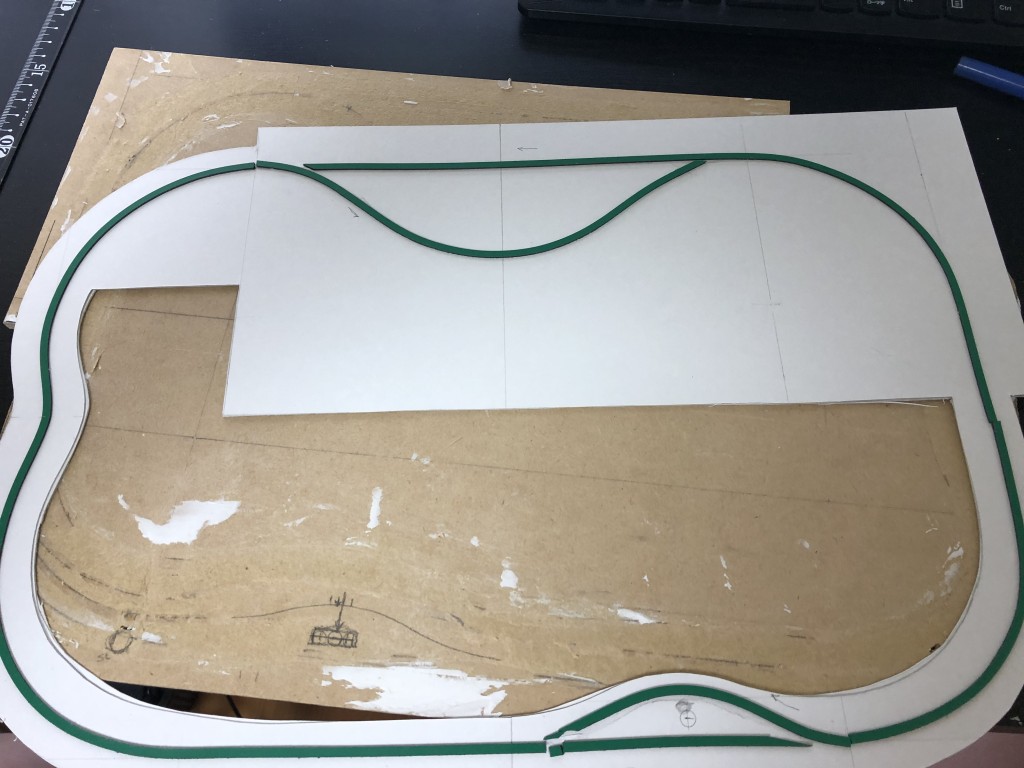
構想としては赤線がトラック、青線がバスの経路でグリーンのセンサーAからBへ通過したらPost hornが流れて、トラックは左下の待避所で停止してバスとすれ違う・・というシーンを予定しております。右側通行ですが、山岳地の待避所がある左へ避けるという感じです。
電気回路
音を鳴らすためには、音源再生ボードが必要です。音源は前のWebサイトでダウンロード出来ますが再生はどうするか?
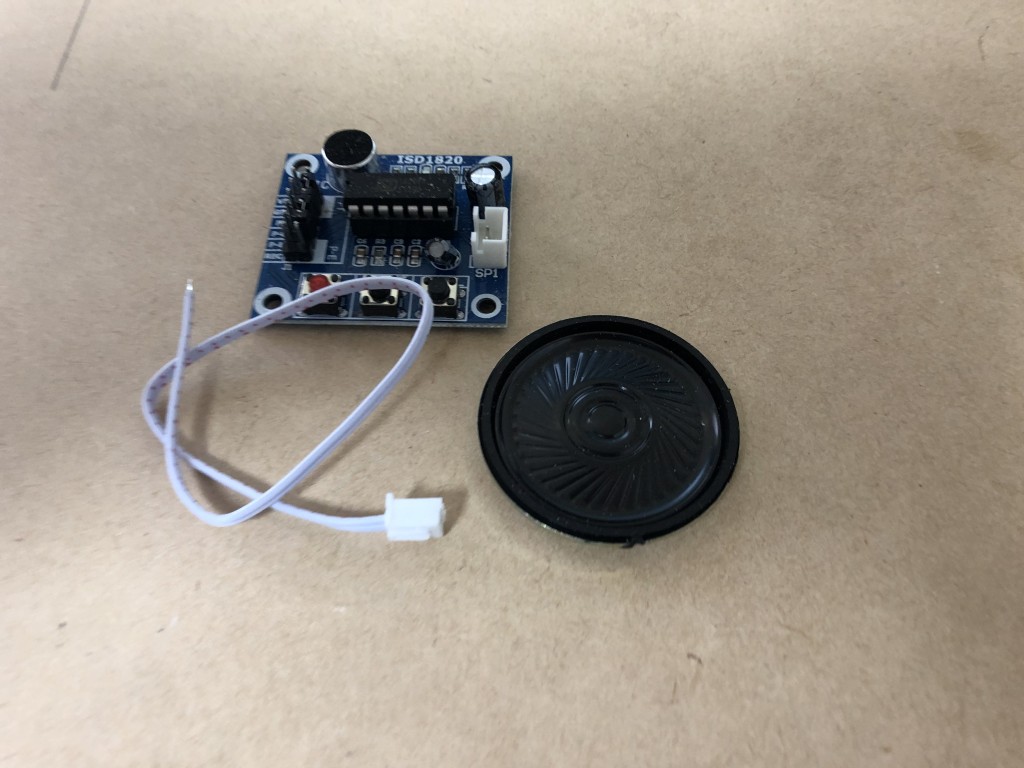
ネットで見つけたISD1820を使った録音・再生ボードです。なんと送料込みで170円(中国から)。赤いボタンを押している間に10秒間録音が可能で、隣の黒いボタンで再生です。ちょうどPost hornが10秒なので最適です。
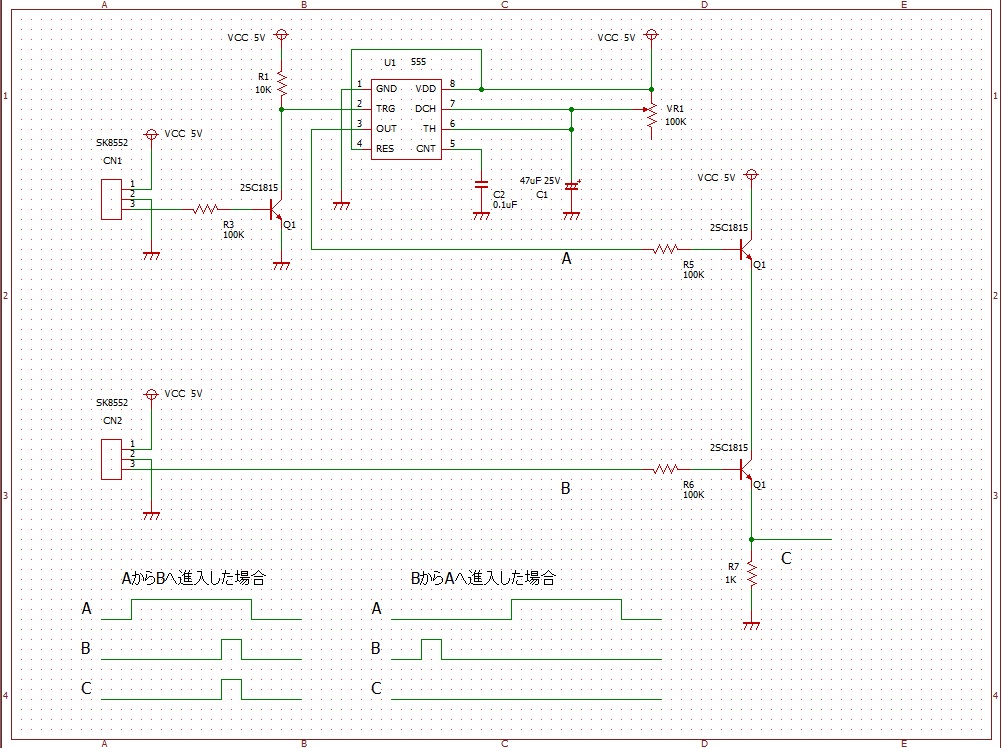
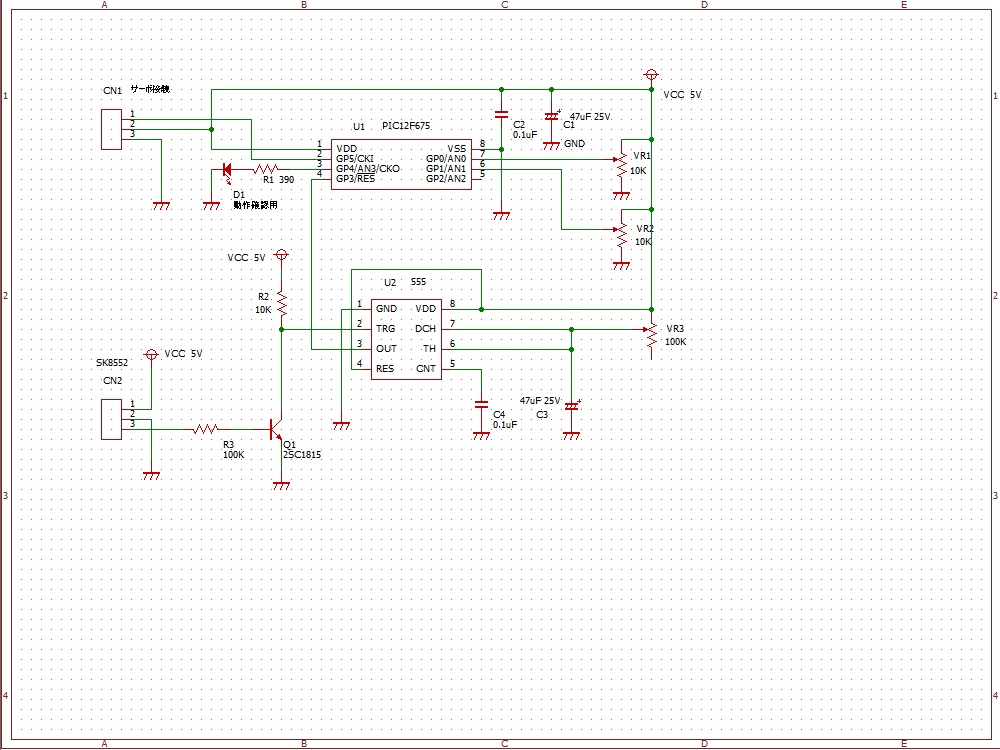
回路は2つのセンサー間でA→Bだと出力Cが出て、B→Aでは出ない必要があります。センサーはZ Carの誘導用磁石に反応させるため、逆方向から来たトラックでのhornが鳴るのを防ぐためです。かなり適当な回路ですが、信号を555タイマーで延ばして2個めのセンサーの信号とANDするだけです。
回路図のC出力を音源再生ボードの黒いボタンに接続して、完了です。ホール素子がゴム磁石に反応したりして、位置決めや高さ調整に手間取りました。
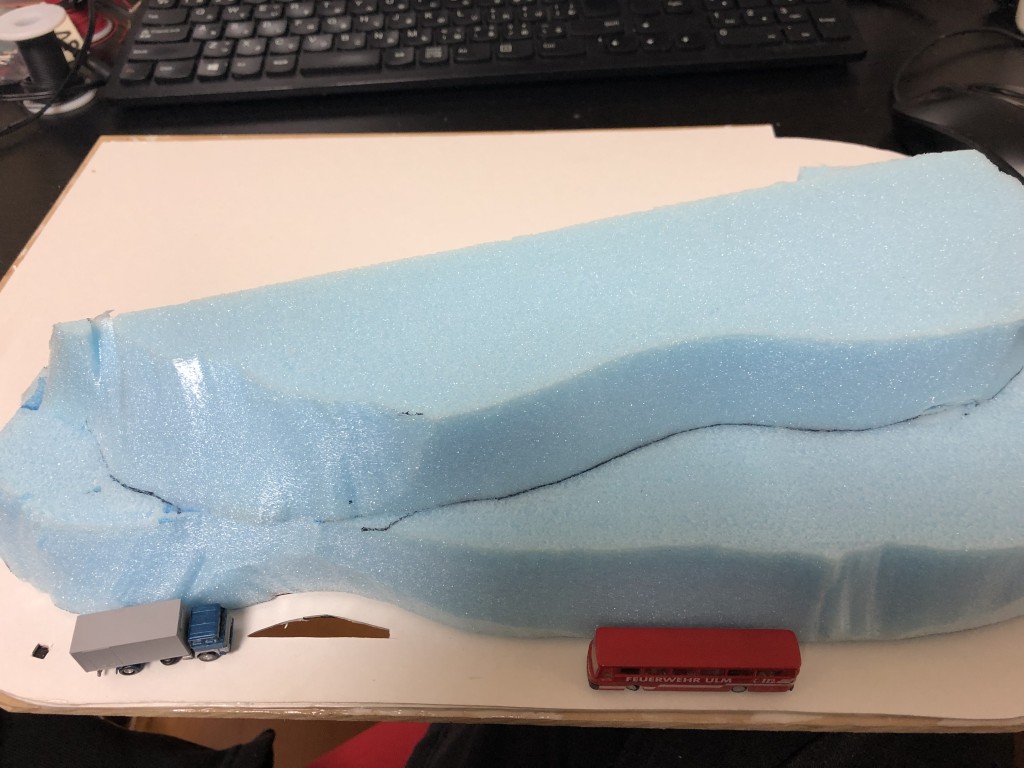
山がこんな感じになる予定。トラックはKibri製でダミーです。穴が開いているのは、停止位置で磁石を近づけることによって車両側のリードスイッチをOFFにするための調整用です。サーボで位置調整が出来れば塞ぎます。
つづく・・・
2019.5.4 追加
裏側に2台を停止させるためのサーボ(磁石付き)と回路を作らないといけません。当初は2台同時スタートさせるだけだと思っていたので、サーボ駆動回路を2個作るだけです。が、、バス用のシャーシとトラック用のシャーシの速度差が大きいことと、走行する距離が違うのでタイミングよく出会わないと衝突します。
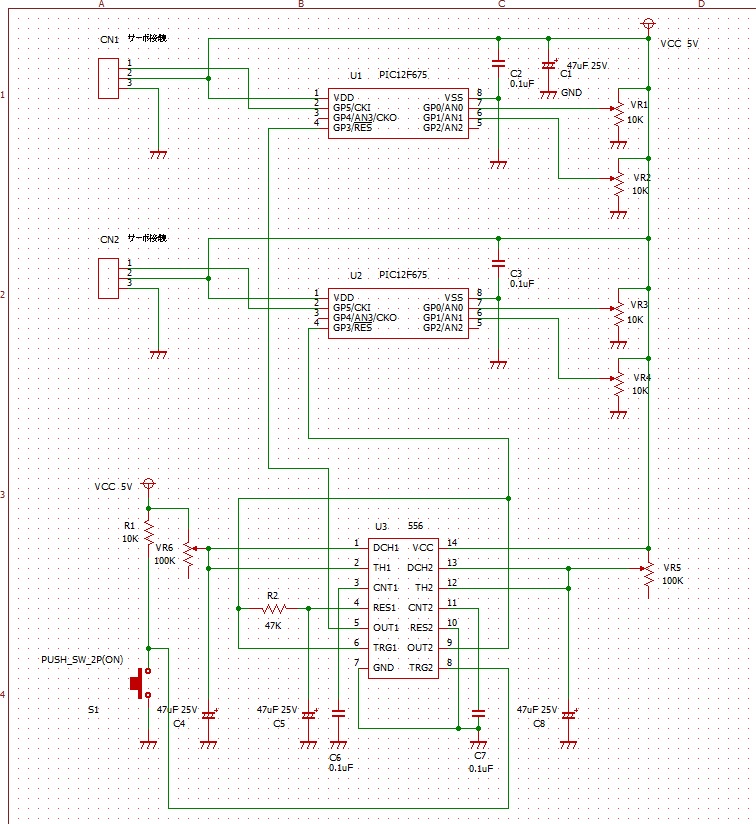
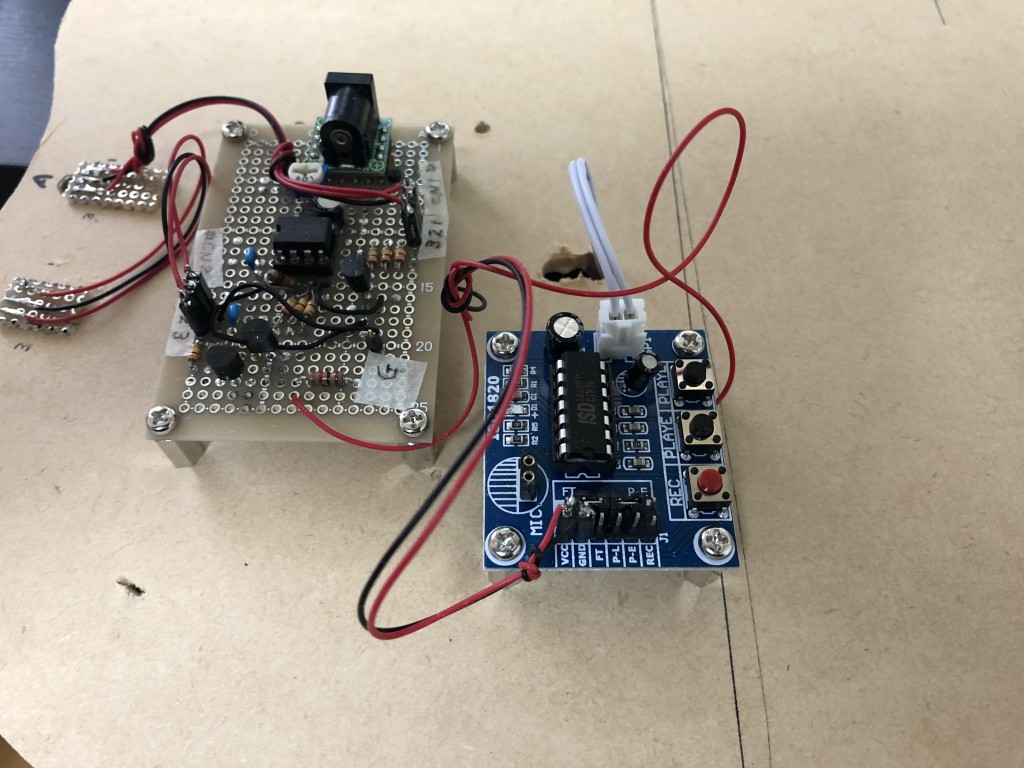
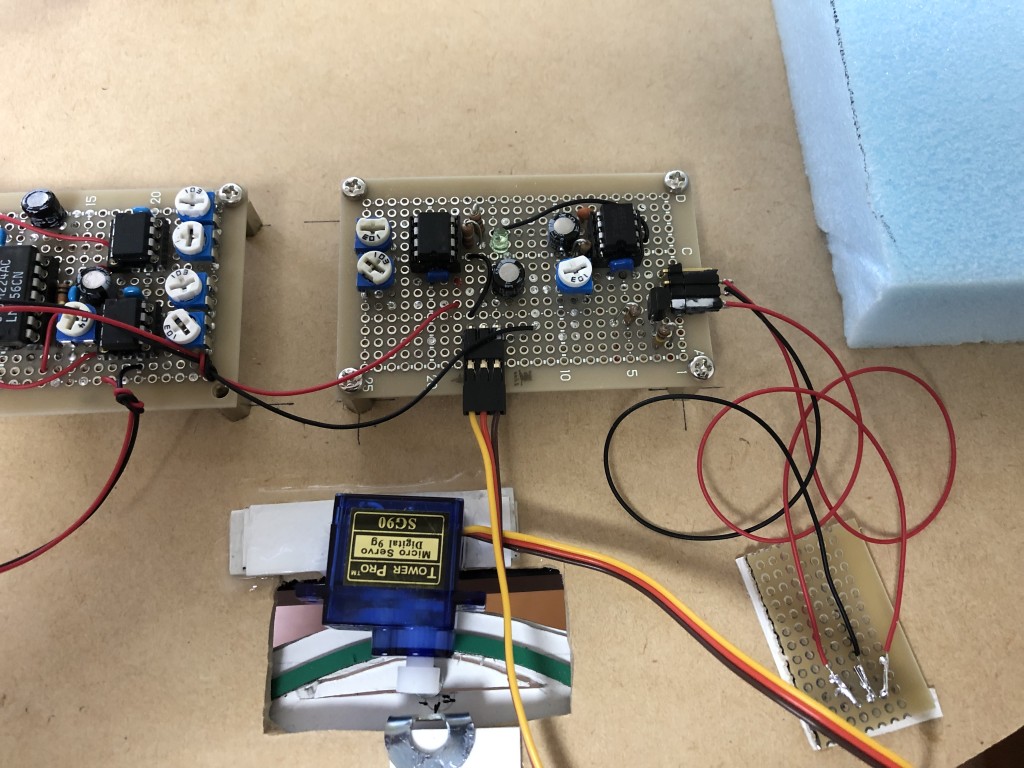
スイッチを押すとCN1側のサーボが即座に作動して、タイマー1の後にCN2側のサーボが作動する回路にしました。555タイマーが無かったので、2個入りの556で2段構成ですが2個目のタイマーにリセットを掛けるとかちょっと苦労しましたがなんとか思った通りに動いてます。
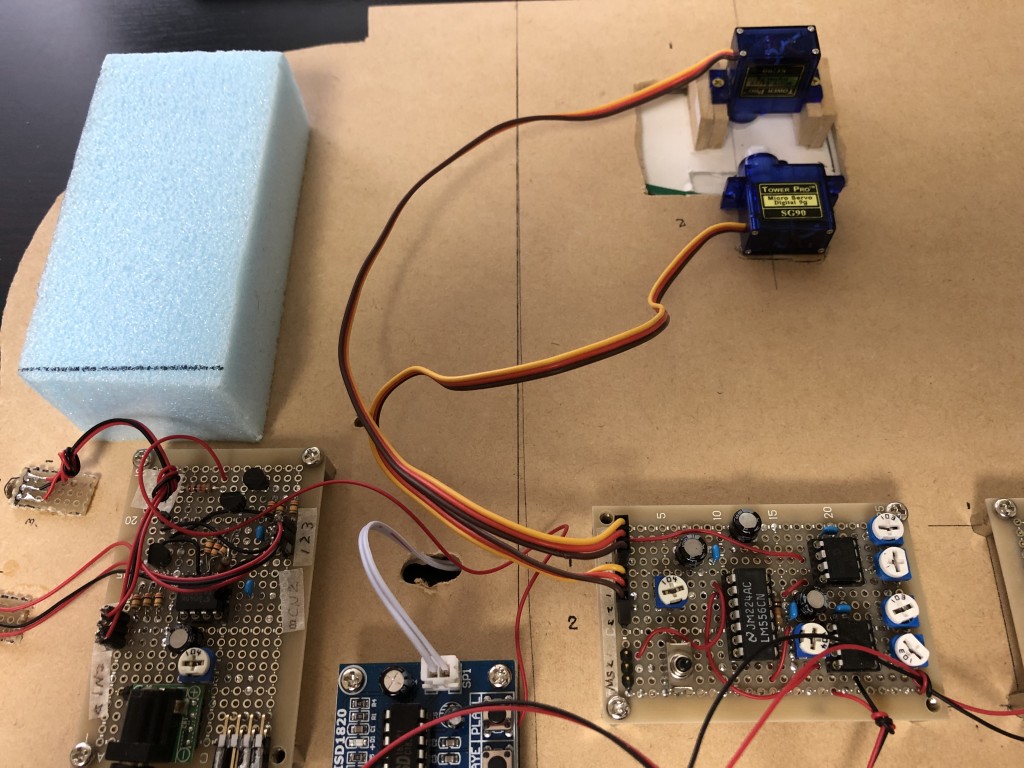
右下が2個のサーボ駆動回路で、その上に見える青い箱が2個のサーボです。
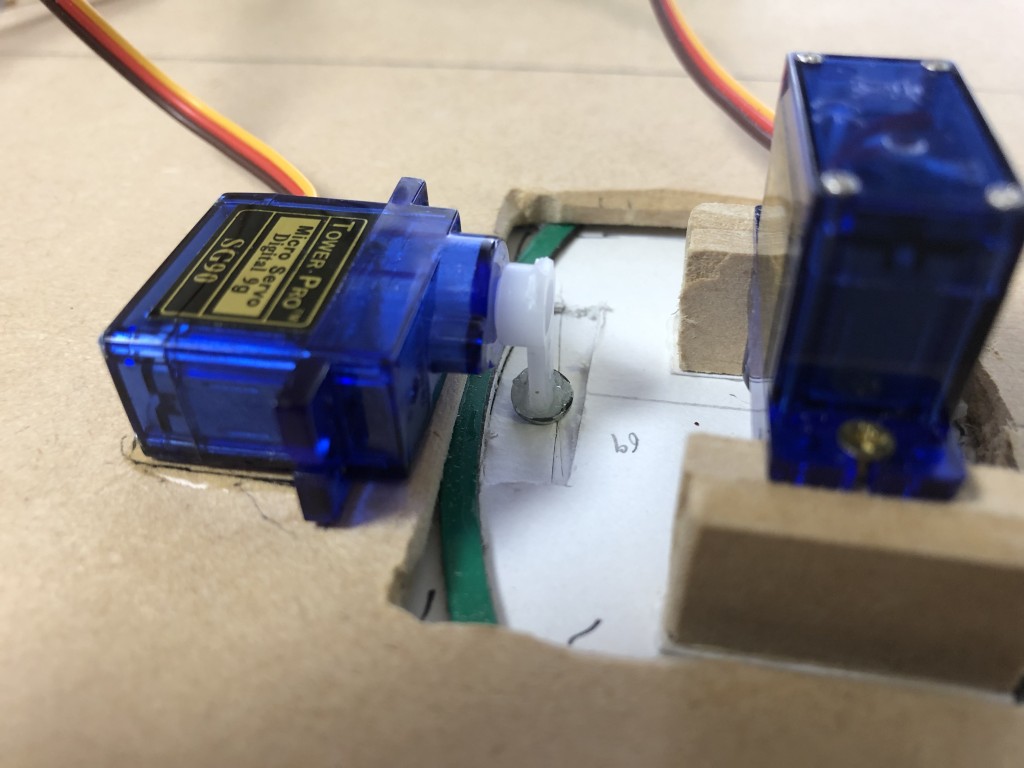
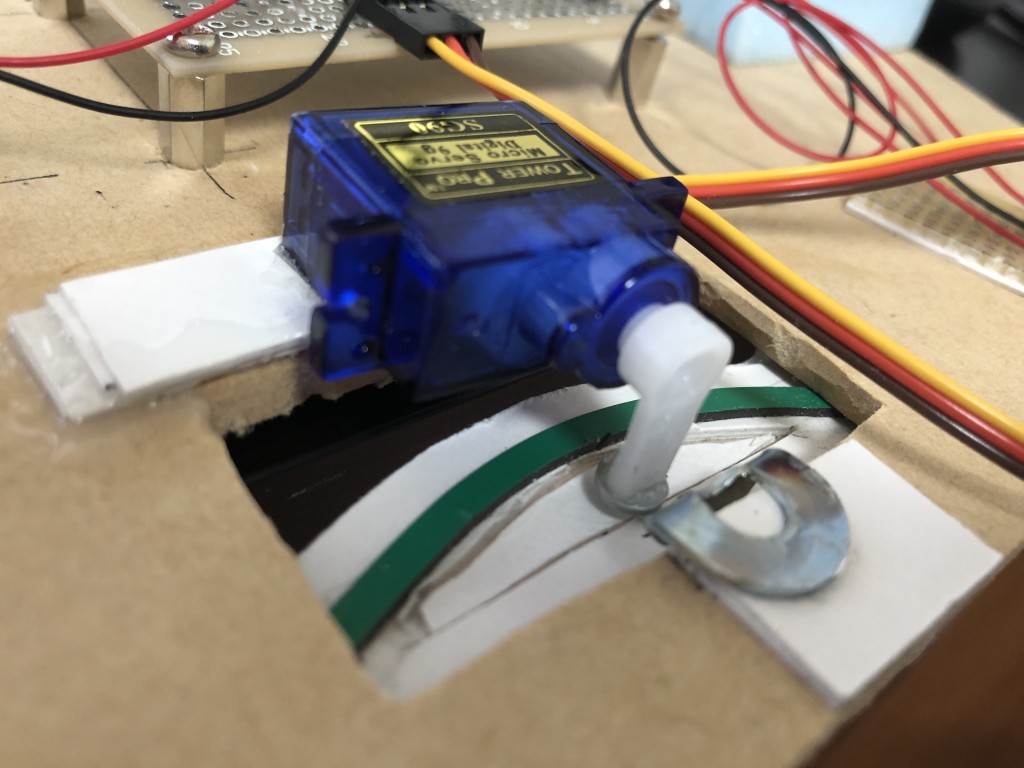
設置スペースやらゴム磁石を跨ぐとかで、サーボの向きが違ってます。サーボのアーム先端に付いているのがネオジム磁石(ロクハンポイントから流用)写真左のサーボが作動して、タイマー1の時間が経過した後に元の位置に戻ると共に写真右のサーボが作動してタイマー2の時間だけ停止して元の位置に戻ります。2つのサーボ共に写真の位置だと車両のリードスイッチがOFFになって停止したままになります。サーボが動くことによってリードスイッチがONになって走り出すわけです。なので、ちょっとでも磁石が動けばいいだけですので動作範囲は適当です。
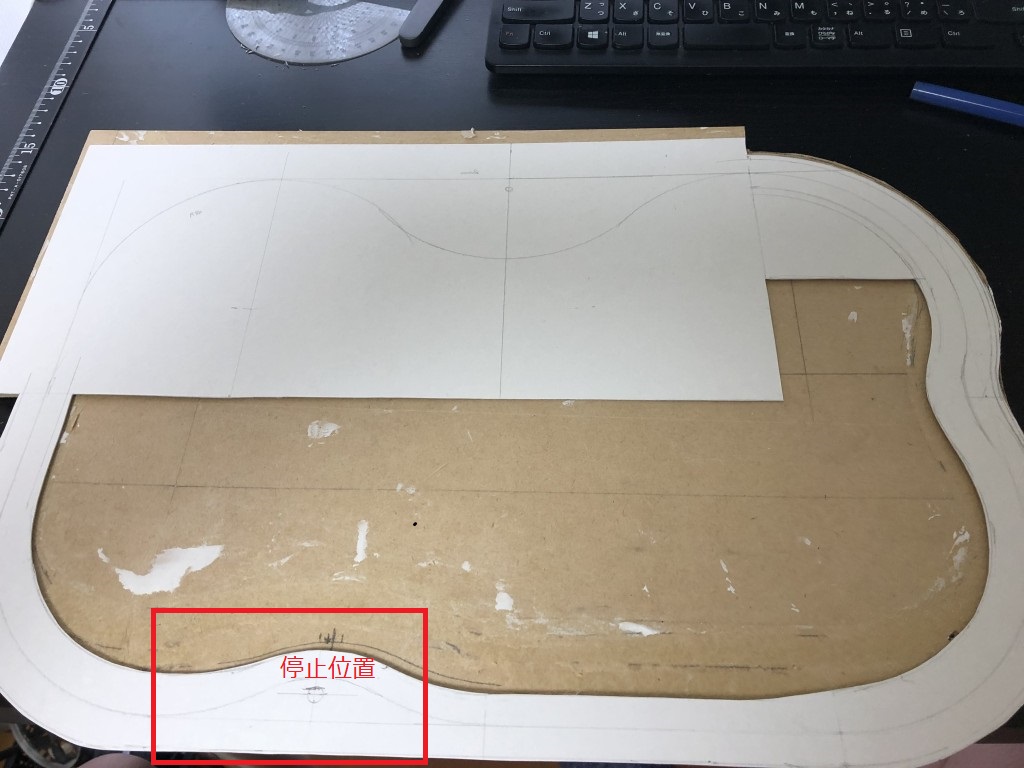
バスとすれ違うトラックの停止位置が写真の赤枠部分です。
裏側から見るとこんな感じ。この回路は停止テスト用に作ったものを流用しています。右下に見えるのがホール素子センサーです。バスとトラック共にセンサー状を通過すると反応してサーボが動作します。本来はポストホーンのように走行方向によって動作させないとかできるといいのですが、面倒なので(笑)タイマーの動作時間を短くして誤魔化しています。トラックも通過時にサーボが動作しますが、サーボ位置まで到達するまでに元の位置へ戻るので、バスとすれ違ってバスがセンサーを通過するまではその位置に停車することになります。
2台の右側面通しを相手に見せる形でのすれ違いなので、リードスイッチの位置が右なのもあってサーボ先端の磁石に2台共反応してしまいます。微妙な位置調整だけだと動作が不確実なので、写真のようなワッシャーを90度に曲げて磁気シールド代わりにしました。こうするとバス側は反応しません。
こちらの回路は特に工夫はありません。