OZD2020でRocrailによる自動運転を実施しましたので、備忘録として設定等をまとめておきます。
2020年12月5日、6日に開催されたOsaka Z Day 2020はオンラインでの開催となり、関東側でも参加することが可能となりました。
ワークショップ的なものとは別に、ライブ運転も面白いのではないかということで関東側ではoceanさんのお宅の場所を借りてのDCCライブ運転を行うことにしました。10時~17時開催でのうち、当初は合間に走らせるということになってましたがコアレスモーターに換装したりしており、連続運転も出来るのでは?ということで長時間走行にチャレンジ。


oceanさん宅の模型部屋の様子です。普段もレイアウトとは別にロクハンレールをテーブル上に敷いてあり、ここに自動運転用にセンサーを付ければなんとかなるのでは?というのが最初です。

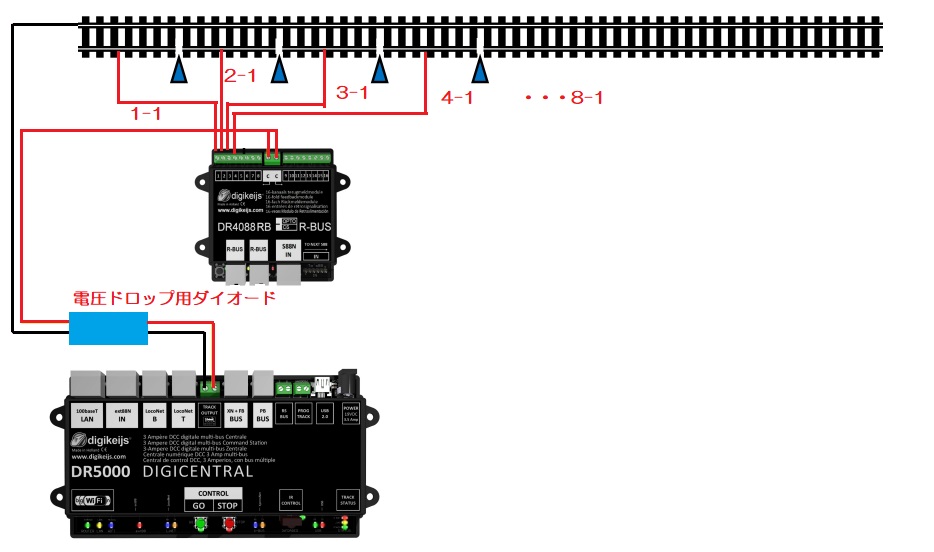
センサーは、DR4088RBで16ポートありますから複線の内周、外周それぞれ8か所のセンサーとして接続できます。実際には、右のようにDCC片線をそれぞれ検知するブロック(ギャップで切られた線路)に接続するだけです。黒線の方は、電圧降下も考えて4か所くらいに接続しています。コマンドステーションも我が家で予備に置いてあったDR5000を使用することに。
16か所のブロックで列車を検知できるのですが、少し長めの編成を走らせたいなぁということもあり、テーブルを買い足して線路も拡張することにしました。
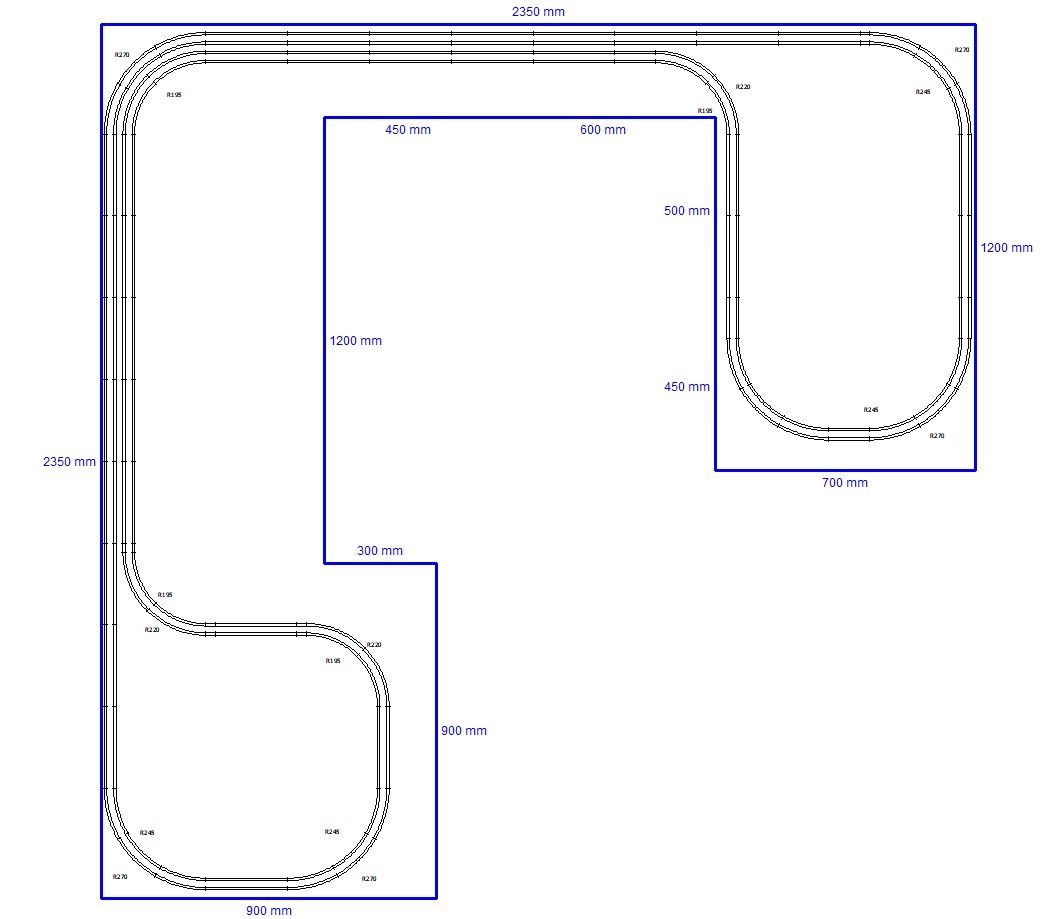
長い方向は2350mmあります。複線のドックボーン型になります。
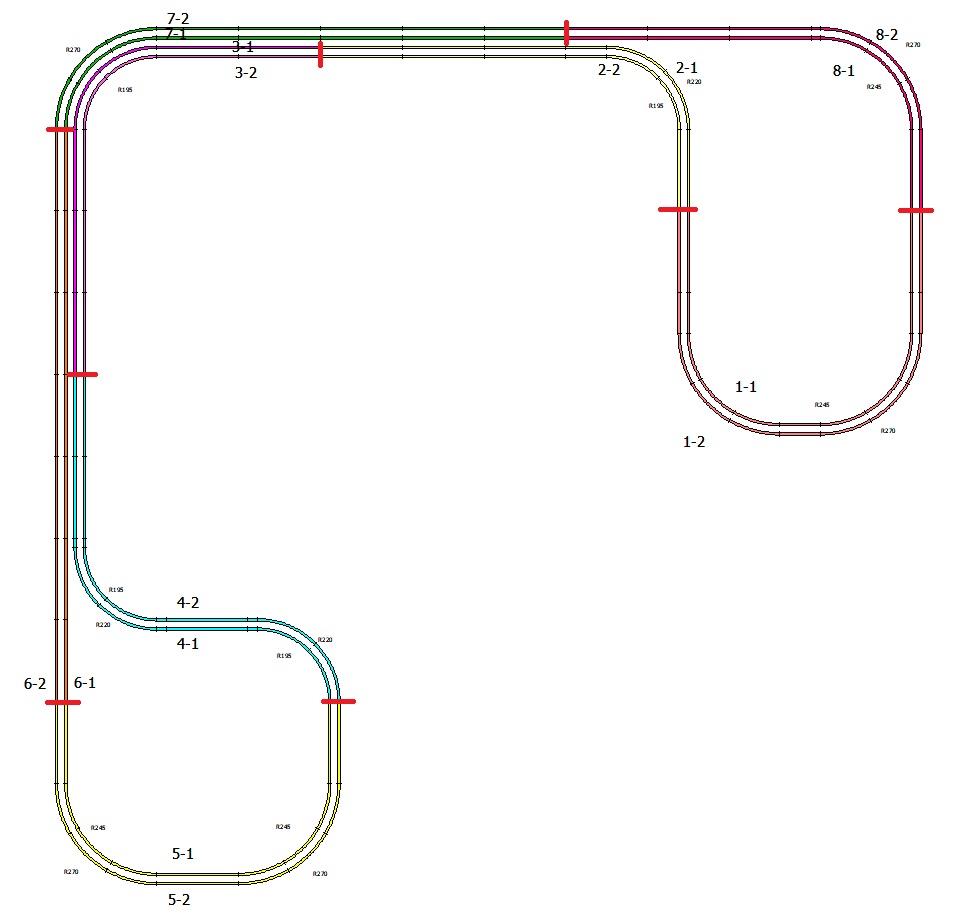
線路にギャップを切ってブロック分けする必要があります。片側のみギャップで切るので、ロクハンのギャップジョイナーは使わずにアトラス製のコード55用ギャップジョイナーを使いました。24個で2ドルくらいです。絵のように外周は1-2~8-2、内周は1-1~8-1となっており、全部で16か所のブロックができます。ギャップジョイナーを使うので、どうしても線路の接続部分になりますので、各ブロックが均等の長さにはなりませんが、平均して1.2mずつくらいになっています。
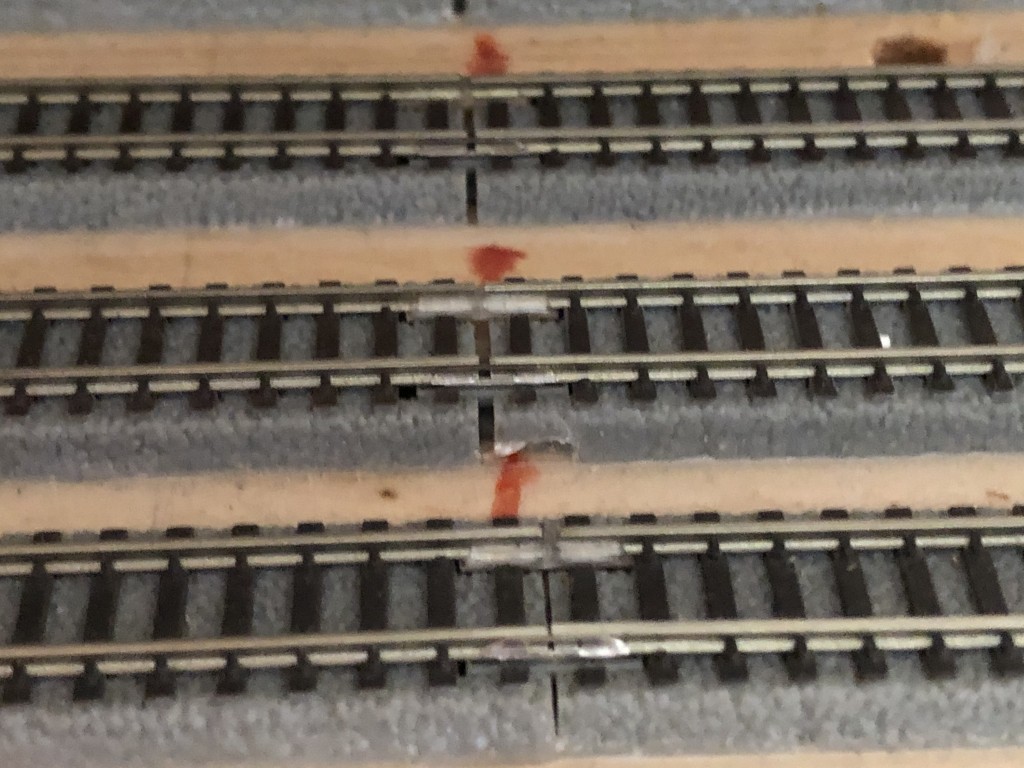
ギャップはアトラス製のプラスチックジョイナーです。写真はGotthardですが、同じものです。線路手前側は普通のジョイナーで向こう側の透明なジョイナーがギャップです。

給電はそれぞれのブロックに必要ですが、ロクハンの給電用フィーダーケーブルを買うと高くつくので、oceanさんが自作しております。
その2からRocrailの設定について解説していきたいと思います。
