

3DモデルのRe4/4 Iはデコーダー搭載まで出来ましたが、いまいち低速がうまくいっておりません。
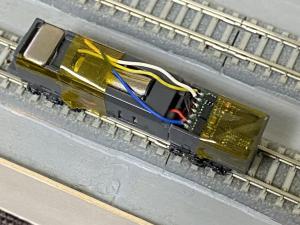
デコーダーはCTのDCX74です。今は向きも変えて少しキレイにしてます。ライトへの配線の青、白、黄色はまだ未配線のままです。
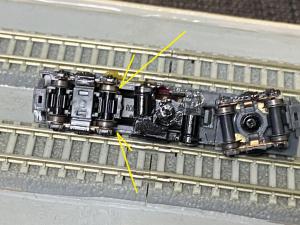
裏はちょっと汚いんですけども、動力台車の車輪は集電能力を増やすためにゴムタイヤの車輪を普通のものに変更してあります。
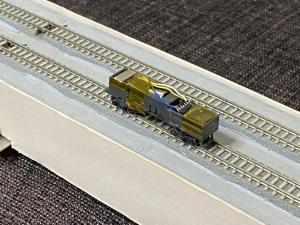
スローは効く(スロットルの1~5とか)ですが、スロットル10前後でガクガクします。スピードを上げれば問題なくスムーズです。
スタート電圧(CV2)を12くらいにして、BEMFのP値を80、I値を0にしたうえでBEMFのリファレンス電圧を決めるCV64(CT独自)を120に設定して安定して走るようになりました。
メルクリン5極モーターの頃は、ほとんどデフォルト値でスムーズに動作するデコーダーだったので、改めて設定すると複雑な構成ですね。
ただやっぱりショーティは重量不足で、集電不良っぽい動きをします。
 により2022年5月3日 at 14:09に更新されました。
により2022年5月3日 at 14:09に更新されました。