- このトピックには2件の返信、1人の参加者があり、最後に
 かがみにより2023年2月19日 at 08:11に更新されました。
かがみにより2023年2月19日 at 08:11に更新されました。
-
投稿者投稿
-
2022年4月17日 12:34 #16119
メルクリンの3極/5極モーターは、元々10Vのアナログ用に作られていてかなり昔にDCC化した場合の電圧をどうするかフォーラムでも議論したような記憶があります。
海外のサイトにまとめがあるのでわかりやすいですが、デコーダーでも電圧ドロップが発生するので12Vくらいが良いようです。
Digitraxのマニュアルには10~12Vと書かれてますが、10Vだと低すぎてD&Hを採用しているVelmoはダメみたいです。動きますけどね。
Gotthardレイアウトは、元々複線だったので、コマンドステーションとブースターでそれぞれ分けて給電しておりました。
DR5000は残念ながら出力の電圧制御はなく、簡易的にダイオードを並べて電圧を落とす方法を採用しました。入力のACアダプタの電圧変更によって出力電圧は変わりますが、最低でも15Vが必要なようです。ダイオードが4本並列に接続されていますが、15V出力で約4~5Vドロップさせて10Vになるようにしたのが最初です。10Vだと不具合が出るときがあるので、現在はACアダプタの電圧切り替えで線路上では12Vになるようにしてます。

途中で単純なエンドレスに変更して、ループ部分をリバースで折り返すプランに変更されました。

分離していたのを接続するために、マニュアルにも書いてある通りに両ギャップを入れて接続しています。コマンドステーションとブースターの間は、電圧差が0.8V以内にするように注意書きされています。
黄色矢印が両ギャップで、ブースターとの分離箇所になります。ここを列車が跨ぐときに時々スピードが速くなったりしてます。
考えてみると、ダイオードに流れる電流によって電圧のドロップが変わるので両方とも均等に消費されていないとダメなのかも。。複数の列車が同時に走るようになっているので、気にならなかったですがコマンドステーション側かブースター側に偏って走行していると起こるような感じです。
ダイオードによる電圧降下は、安価で簡単に作れますがブースターとの接続だと問題なのかも。コマンドステーション側で出力電圧制御が出来る方がいいですね。
2022年4月18日 20:14 #16126
コアレスモーターへの換装も進んで、1両で0.1Aも消費しなくなったのでブースターは切り離してコマンドステーション単体で線路への給電をすることに変更しました。
ポイントデコーダーとかアクセサリ系はブースターから給電しています。
配線変更の際に給電側の1本がコマンドステーション側とブースターの両方に接続している箇所があって、もしかするとこれが原因だったのかもしれません。とりあえずはすっきりしました。
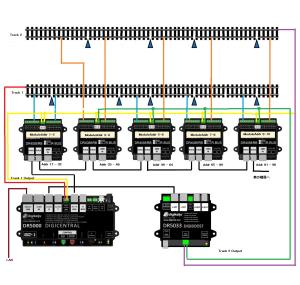
2023年2月19日 08:11 #17477その後、レイアウトを作り直しているので、ブースターの接続も考えてみました。
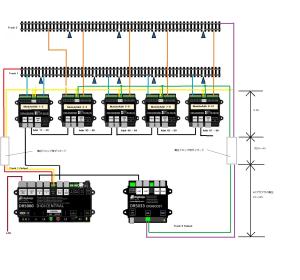
コマンドステーション(DR5000)の出力は、ACアダプタ(15~24V)で変更可能です。ダイオードを直列に4個配置した回路では、ダイオード1個当たり0.7~1V電圧がドロップします。さらに列車位置把握用のDR4088のフィードバックモジュールで0.9V程度ドロップします。ACアダプタのすつりょくを17Vにしたいところですが、電圧タップ切り替えが15、16、18・・・になっており、16か18の選択しかできませんので、16Vにしています。

テーブル上にエンドレスを作って、青線のところを両ギャップで絶縁してそれぞれにコマンドステーションとブースターを接続しています。前のレイアウトでは両ギャップの部分を車両が跨ぐ時に一瞬止まるような動きをしておりました。


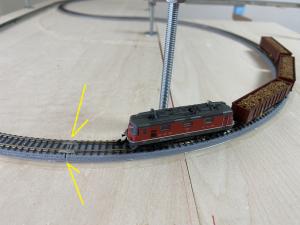
ギャップはこんな感じで、Atlasのギャップです。ちょっと長いんですけど、ロクハンレールにはちょうど良く刺さります。
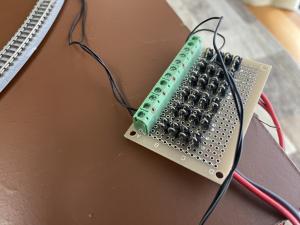
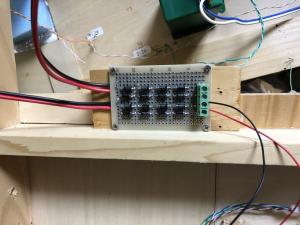
ダイオードは4個直列で、1Aタイプなので複数に分かれています。コマンドステーションとブースターそれぞれ3列ずつです。

コマンドステーションとブースターはLoconetで接続されております。コントローラはXpressnetです。
走行させてみた感じでは、両ギャップ部分は問題なくて車両を跨って停車させても問題ないですね。当然なのかもしれませんが・・
コマンドステーションとブースターで消費電流差が大きいとダイオードでのドロップ電圧も変わるので問題なのかもしれません。前はブースター側にアクセサリデコーダの電源を接続していたのも原因なのかもしれないので、アクセサリデコーダ類は別電源にしようかと思います。
-
投稿者投稿
- このトピックに返信するにはログインが必要です。