■Lenz Compactの裏側
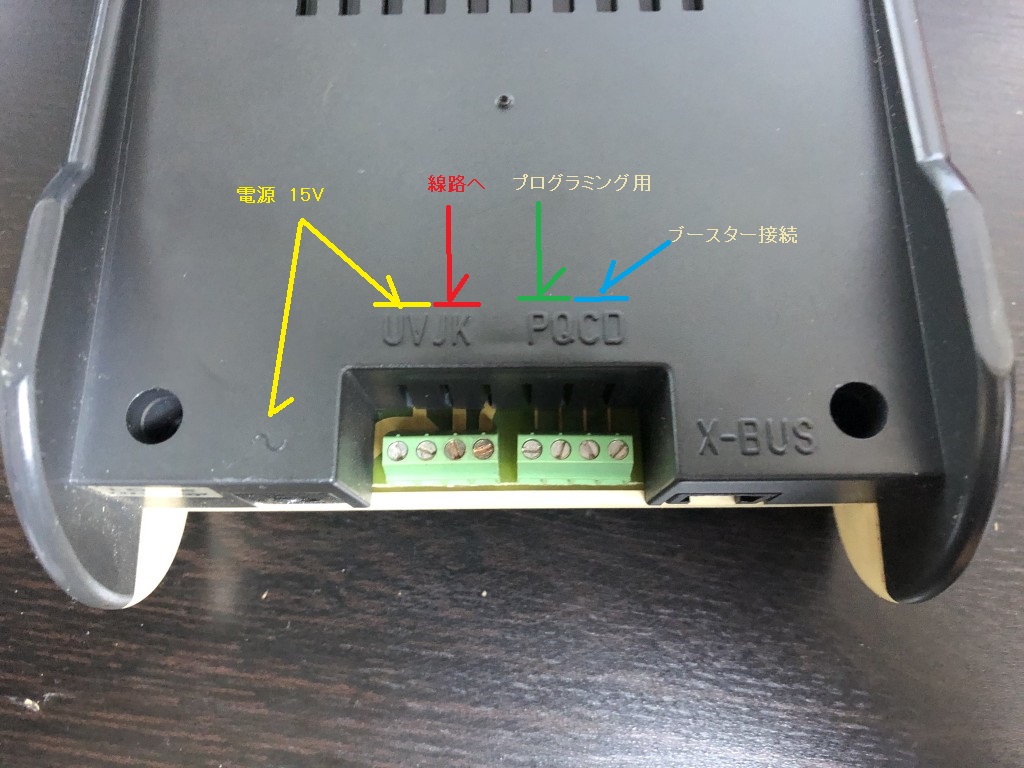

左から電源を接続する「U」「V」の端子(ACアダプタを接続するコネクタも付いている)があり、ACアダプタを使うかトランス等から配線するかが選べるようになってます。日本だとACアダプタと言うと直流の9Vとか12Vを出力するものが多いですけども、欧州は交流のままの方が多いのか、AC14~16Vが指定されています。OEM先のAtlasのマニュアルだと直流のDC14~18Vとなっており、いずれにしても内部に交流->直流の変換回路があるようです。
「J」「K」が線路への出力です。通常だと電源つないでこの2本を線路へ接続すれば遊べるってことですね。
「P」「Q」がプログラミング用です。
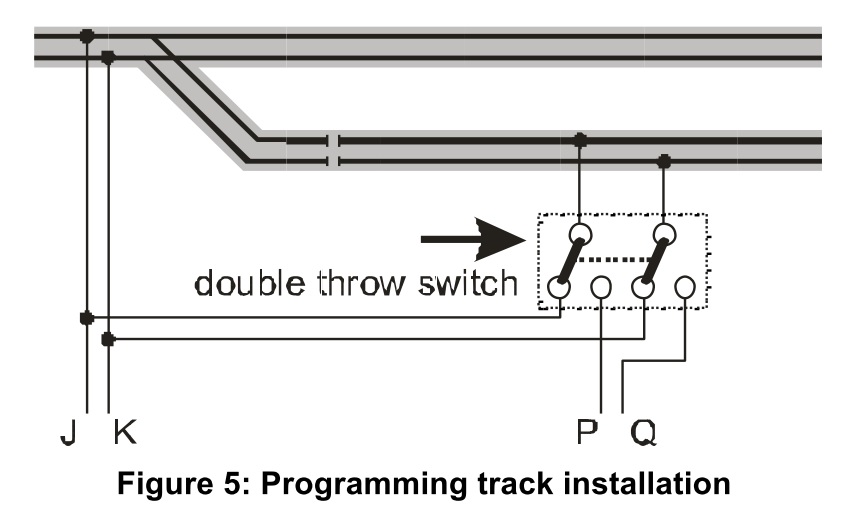
マニュアルに載っている接続図です。実際には「J」「K」の線路出力でも機関車のアドレスを変えたりはできるのですが、同じ線路に複数の機関車がいると書き換わってしまうので上図のように引き込み線に入れて「P」「Q」に切り替えて書き換えるってことですね。この辺りは欧米系のレイアウトでよく見かけられるレイアウト上に車両を置きっぱなしというところから来ているような気がします。Zだと車両も小さいので、別のコマンドステーション(DP1とか)で書き換えた方が楽だと思います。
「C」「D」はブースター接続用です。
右端の「X-BUS」と書いてあるのがXpressnetと呼ばれるLenz独自のバスになります。
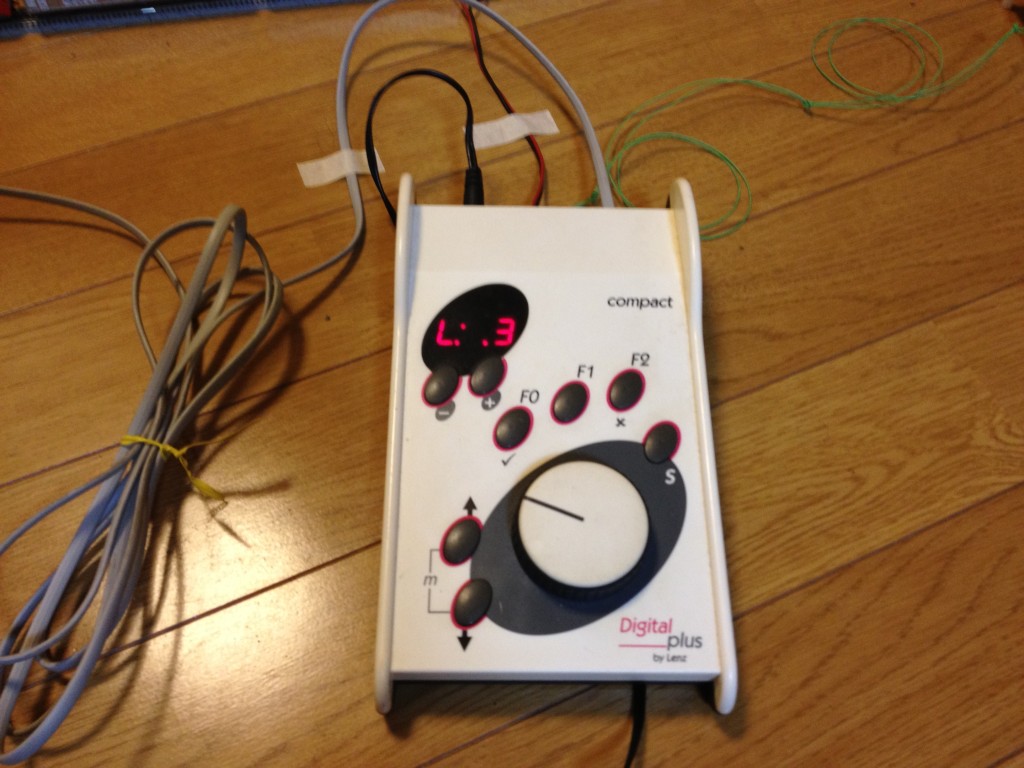
とりあえず、単体でも問題ありませんがご覧のように「L 3」と表示されているのが機関車のアドレスで、「+」「-」でアドレスを変更すれば違う機関車の制御が出来ます。ただし、2桁のディスプレイなので99までしか選択できません。DCC規格だと4桁使えるのですが、この辺は入門用として割り切りですかね。
ただ、機関車が増えてくるとどれがどのアドレスだかわからなくなってくるんですよね。アドレス自体は機関車の裏側とかに番号を貼ったりして、区別が付きますが走行中は混乱します。BR185とかなら185とか、複数いれば1851,1852とかにしたいですよね。
■Xpressnet
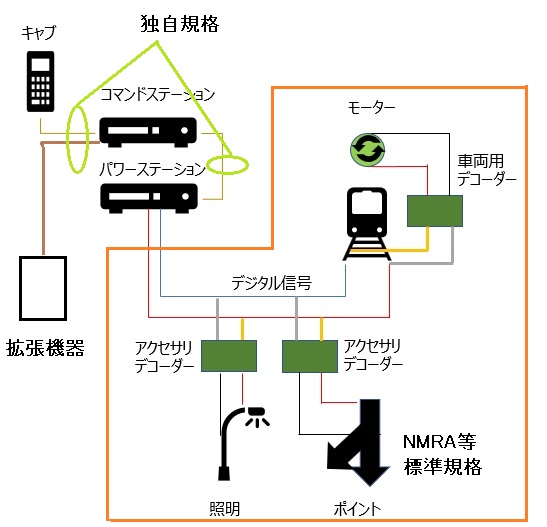
DCCは共通の世界標準規格だ・・とかになってますが、実際には車両用デコーダとアクセサリデコーダに対する規格がメインとなってます。つまりコマンドステーションとキャブ、その他拡張機器(別ページでご紹介する予定のフィードバックとか)は、各メーカー独自規格です。いろいろ拡張していく予定があれば、どのコマンドステーションにするのかで先々の道が分かれるってことですね。まあ、この辺りで独自にしないと価格競争だけになってしまうので、囲い込み商法というのも仕方ないところです。
独自規格は、KATOが扱っているDigitraxのLoconetやLenzのXpressnet、RocoのR-BUS(実際にはXpressnetの拡張版)とかいろいろあります。

Xpressnetで使用するコネクタは上図のように3種類あって、RJ-12は電話ケーブルと同じコネクタですが、6芯あるタイプです。
![]()
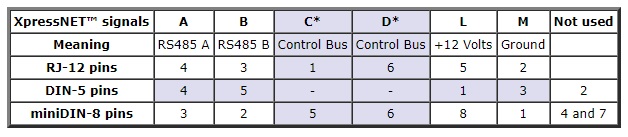
ケーブルはストレート接続で、ようするにケーブル両端のコネクタを爪を上にしてみた時に同じ色の順番で並んでいればOKということになります。実際の信号表を見ると「C」「D」の信号は使っていないので、4芯ケーブルでもOKでしょう。信号2本と電源線2本です。

ちなみにDugutraxのLoconetも同じRJ-12です。4芯のRJ11は使うなと書いてますね。たぶん両端のRail SYNC信号はLenzの「C」「D」と同じでしょうから4芯でもいけそうな気がしますが、ケーブルが混在すると訳が分からなくなる可能性があるので、6芯で統一が無難でしょう。
■電圧ドロップ
前述のようにComapctの電源は、14~18Vなのでたとえば15VのACアダプタを接続してみると線路出力も15V(ややドロップしますが)が出ます。Zゲージだとアナログでは10Vmaxなので、これだとちょっと高いですね。車両デコーダーの方は7Vくらいでも大丈夫(デコーダーによって最低電圧が違いますが)なので、9VのACアダプタが安全そうですが9VだとComapctの方が動作不安定でダメそうです。Xpressnetにも12V供給されているので、最低でも12Vなんでしょう。Lenzの上位機種を買うと出力電圧の制御が付いていますが、さすがに入門用だとそこまでの機能はありません。
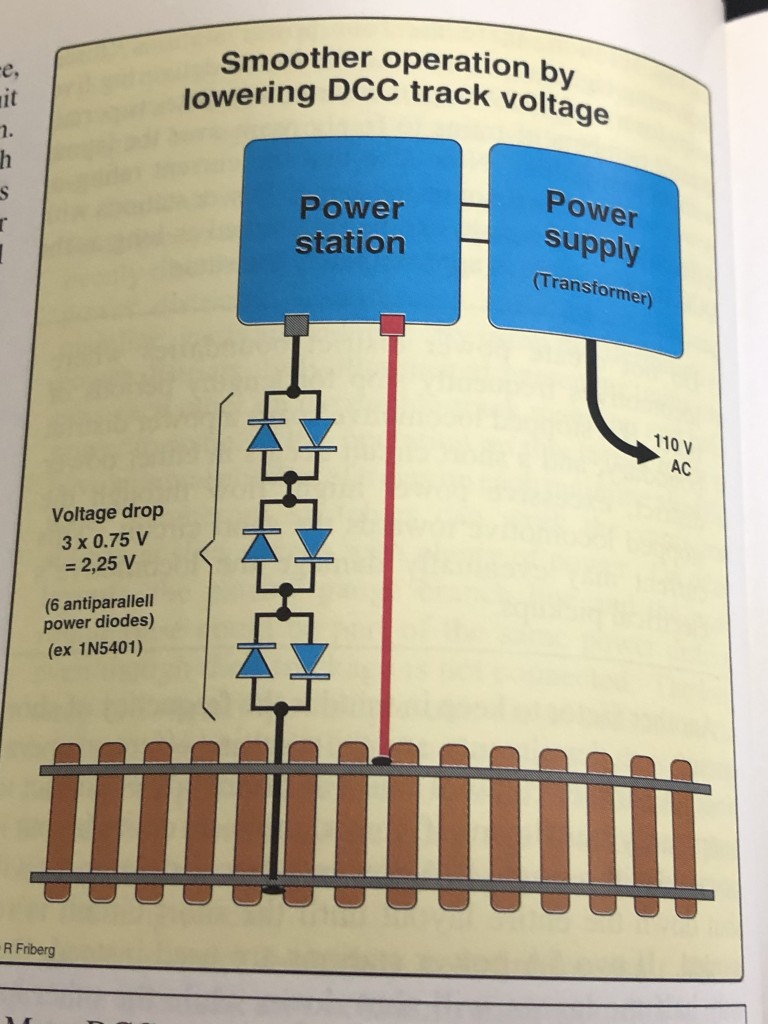
参考書を見てみると、ダイオードでの電圧ドロップ方法が書いてあります。流れる電流で電圧のドロップが変わりそうですが、簡単で安価な方法ではあります。
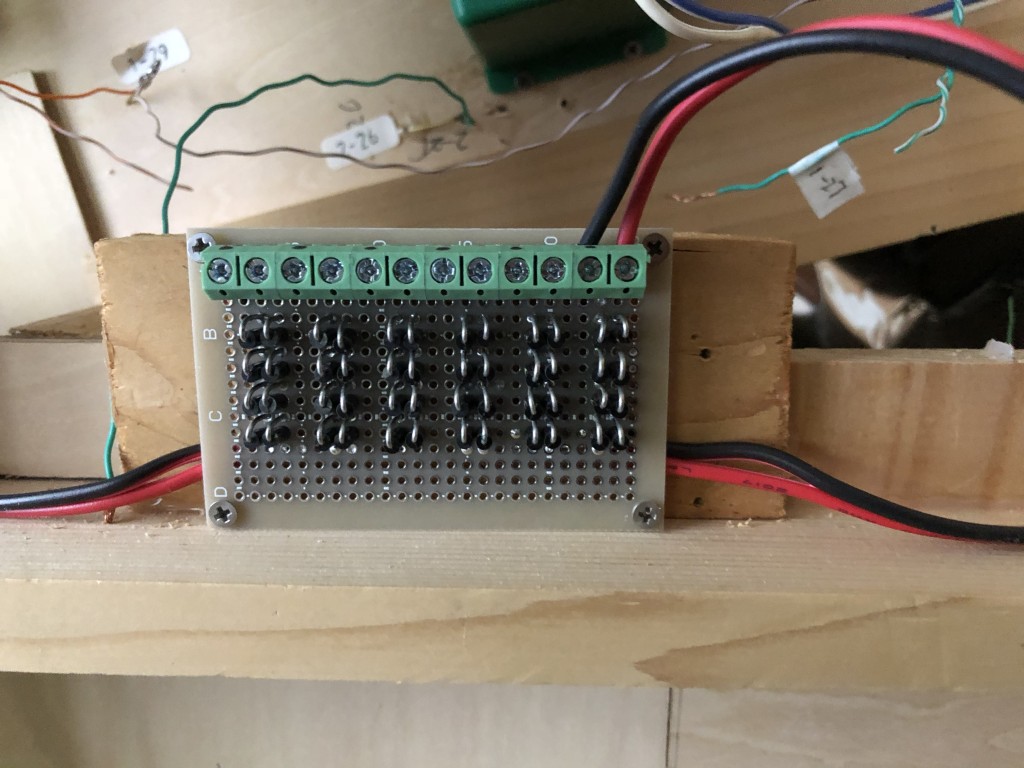
後年作ったGotthardレイアウトでは上写真のようなドロップ回路を入れてます。線路->車両デコーダー間でも多少はドロップするので、あまり下げ過ぎるのも不安定の要素になるかも。
■PCソフト
この段階では、自動運転という目論見はなかったのですがPCから制御できるソフトがいろいろ出ていてしかもフリーで使えるので物色しておりました。
★JMRI
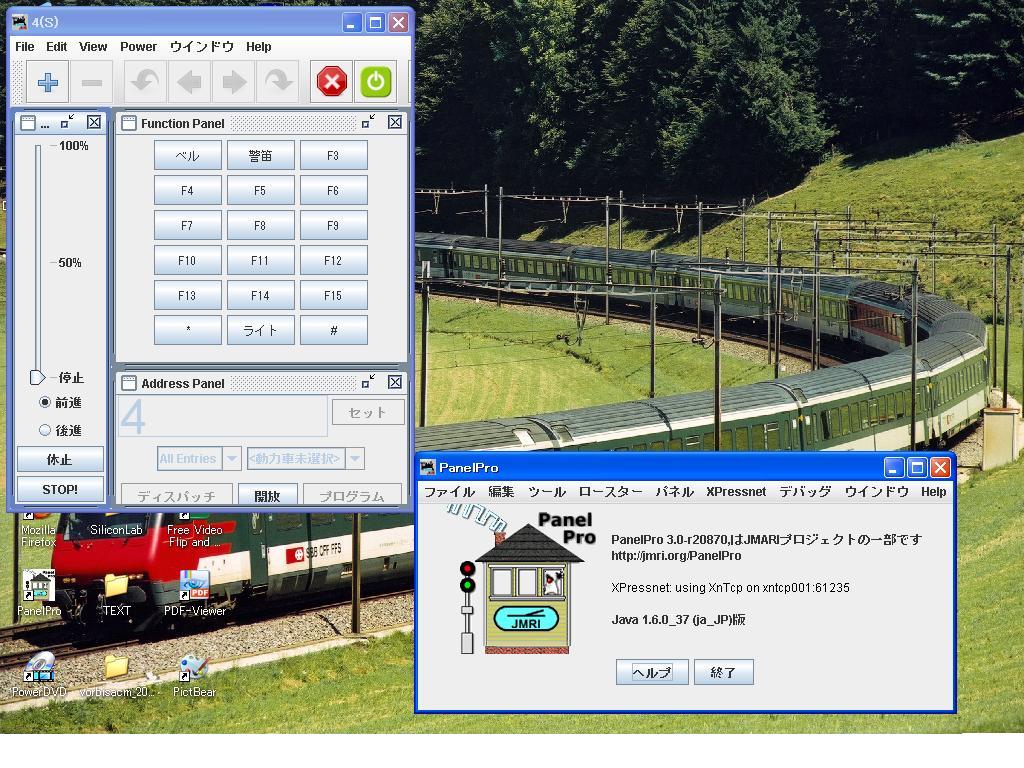
JMRIが一番有名なのかもしれません。Javaベースなので、WindowsでもMacでもLinuxでも動作するのが特徴。DecoderProという付属ソフトを使えば、主なデコーダーメーカーのものはすべてパラメータが表示されてすごく便利です。CVというパラメータだけでなく、まとめて設定できたり意味が書いてあるのでわかりやすいです。ただし、デコーダーが欧米系のみしか対応していないですが。対応するコマンドステーションも欧米系のみです。まあ、欧州製のコマンドステーションがメインなので特に困りません。
★Rocrail
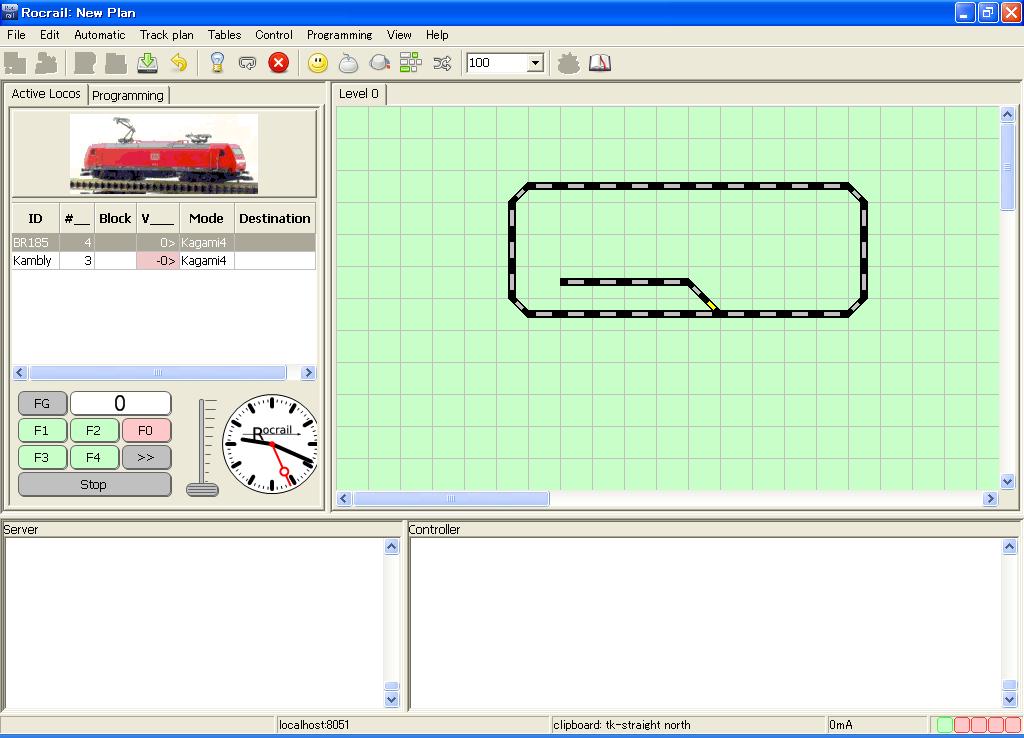
ドイツで作っているRocrailはJMRIとも似ていますが、こちらはC言語で書かれているようです。Windows、Mac、Linuxに対応してます。今はどうだかわかりませんが、導入時にはどのようにコマンドステーションと接続するのかとか、解説がRocrailの方がわかりやすくてJMRIは延々解説の文章だけだったので、Rocrailを使うことにしました。ただ、Rocrailはデコーダーのプログラミングはイマイチなので、JMRIのDecoderProを併用したりはします。
Rocrailの問題点と言えば、国内で使っているユーザーが少なくて情報があまりないことでしょうか?まあ、RocrailのWebサイトで大体解決しますし、元々解説がていねいなのでそれほど困ったことにはなっていません。
■接続してみる
さて、PC側のソフトはあるもののどうやって接続するのかが問題です。XpressnetとかLoconetなどはいわゆる「シリアル信号」であって今時のLANとは違うものです。出来たのが1990年前後ということもありますが、レイアウト下で細いケーブル(芯数が少ない)を長距離で通信できるというメリットは今でも変わらないですし、LANを使うほど情報量が少ないので安価に作れるシステムとしてはよいものです。
当時はLenzから純正で出ているものは、シリアル接続か、USB接続によるPC接続のみでしかも高価。。ネットで調べるとXnTCPというプロジェクトで無償公開されているDIYボードがありました。

XnってXpressnetですね。Xpressnetからイーサネットへの変換を、CPUボードに回路を追加して、このプロジェクトのページからソフトを入れると動作するというもの。

オーストリアから輸入したCPUボードです。$80くらいだったかと。
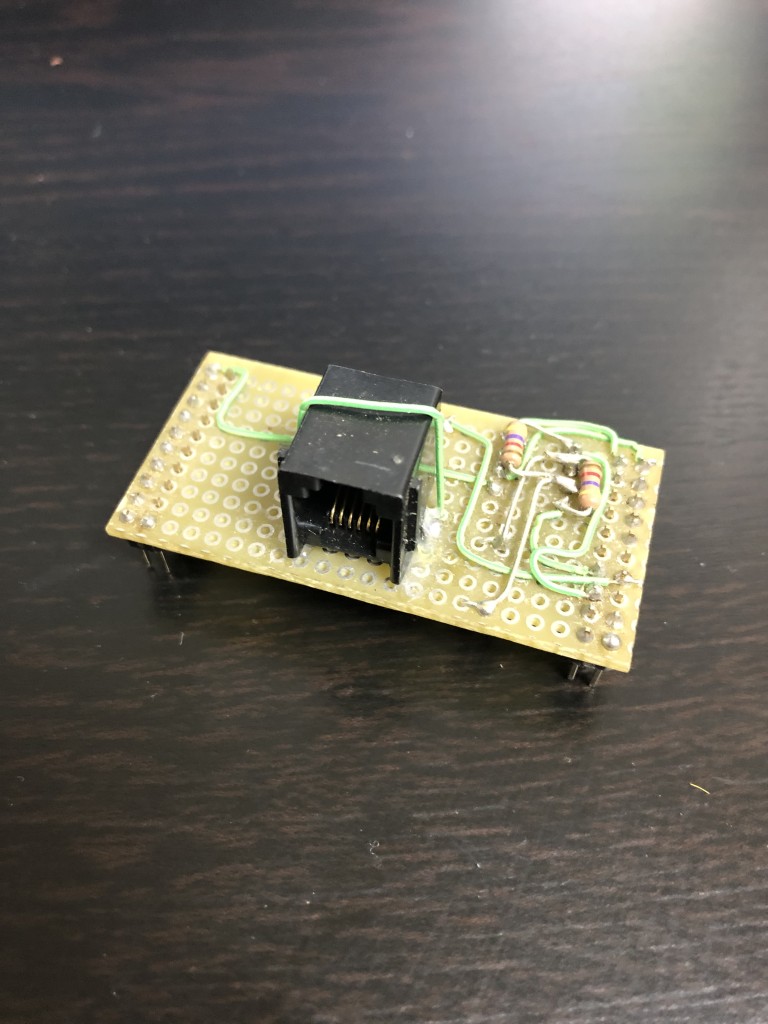
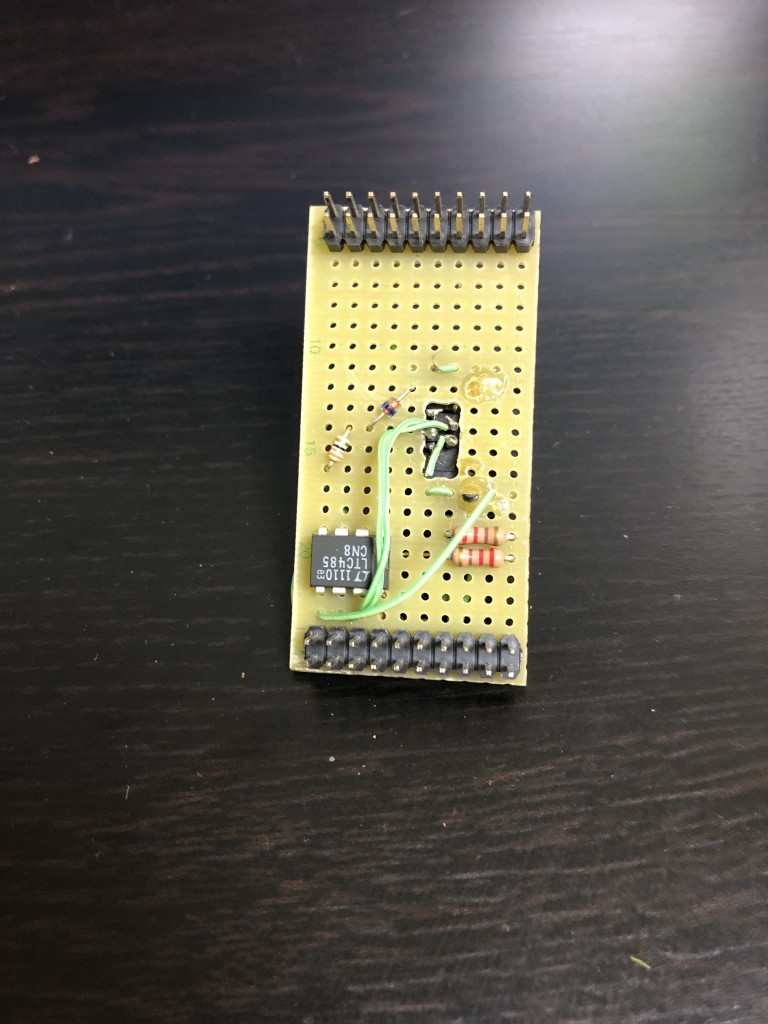
前述のWebサイトにあるような、純正の拡張ボード(基板)もあるのですがシリアルのチップとコネクタを接続するだけなので、その辺にあった基板の切れ端で製作。ちょっと汚い出来上がりでしたが・・・
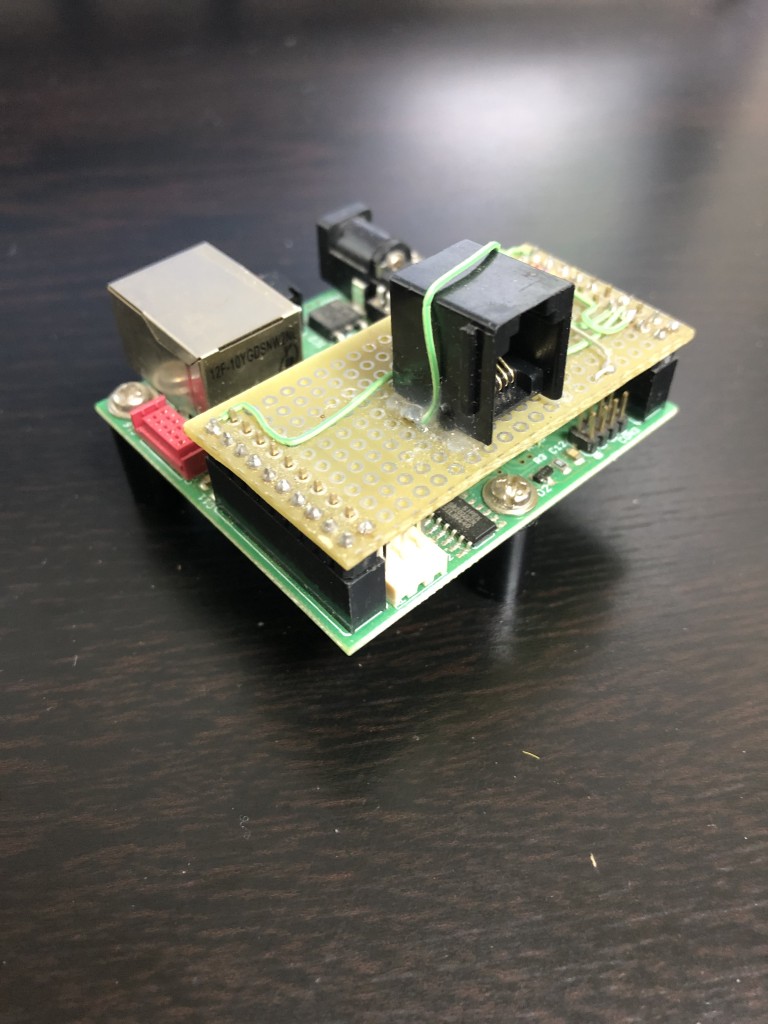
まあ、動けばいいので・・合体させると完成です。
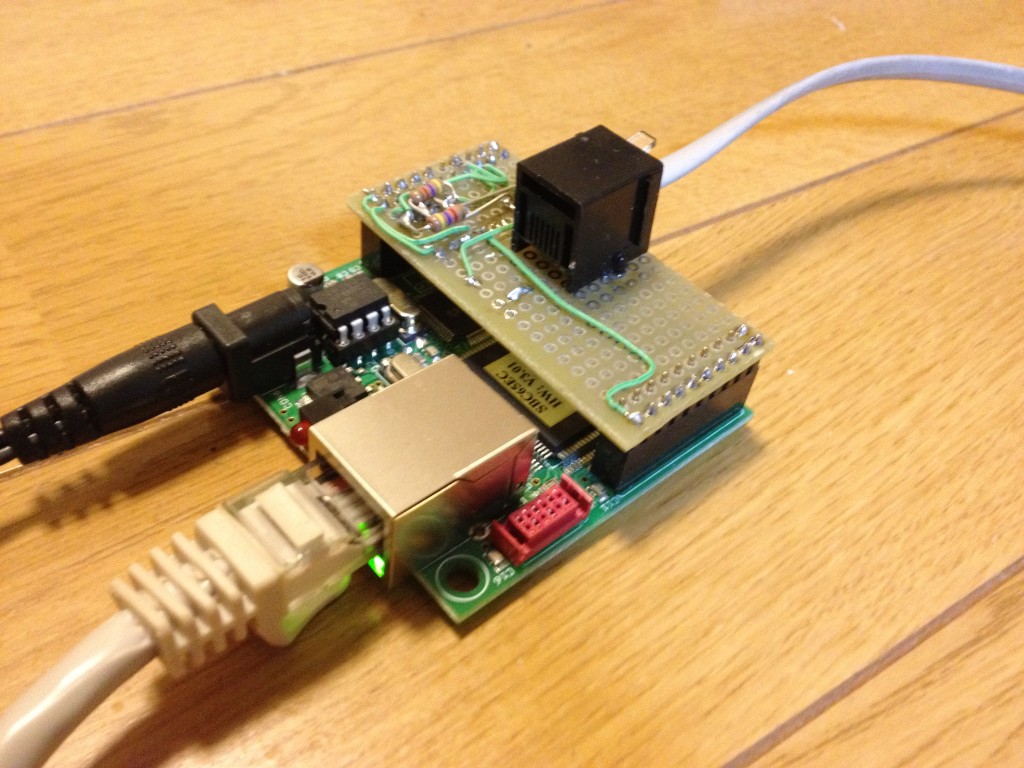
電源、LANケーブル、白いのがXpressnetのケーブル。$80+数百円くらいで出来上がりました。
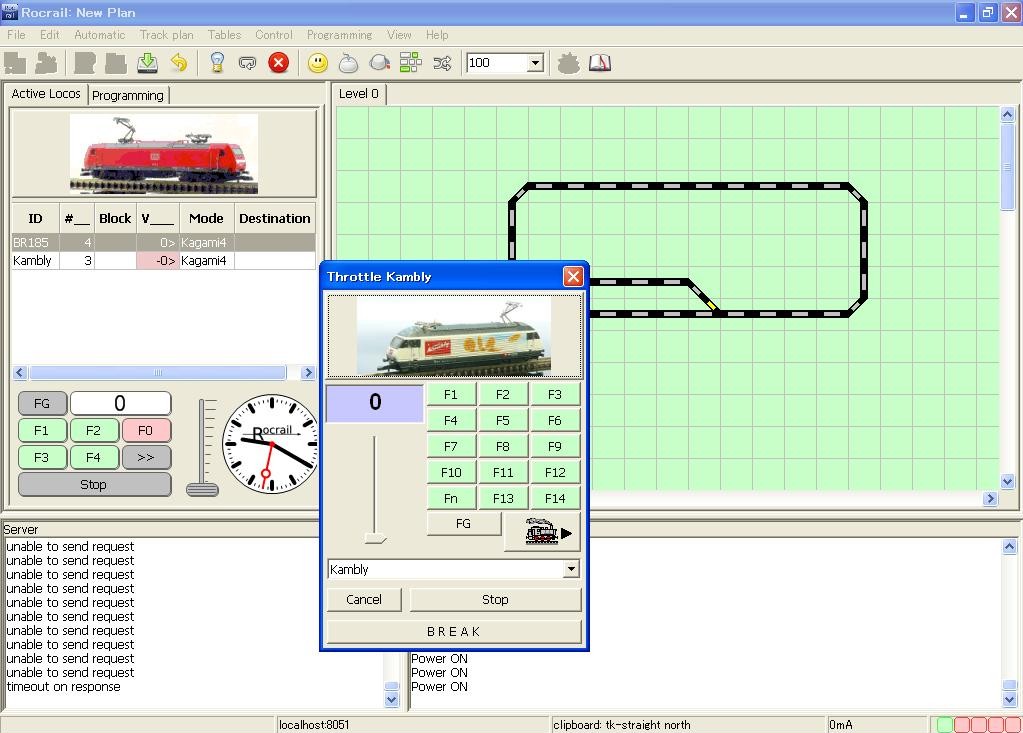
■Rocrailと接続してみる
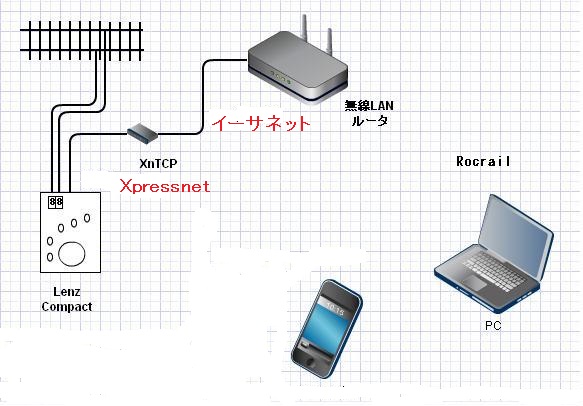
CompactにXnTCPを介してLANに接続し、PCで動作しているRocrailと通信させます。車両制御とポイント切り替えだけで、拡張性はありませんがこれだけでも面白いです。
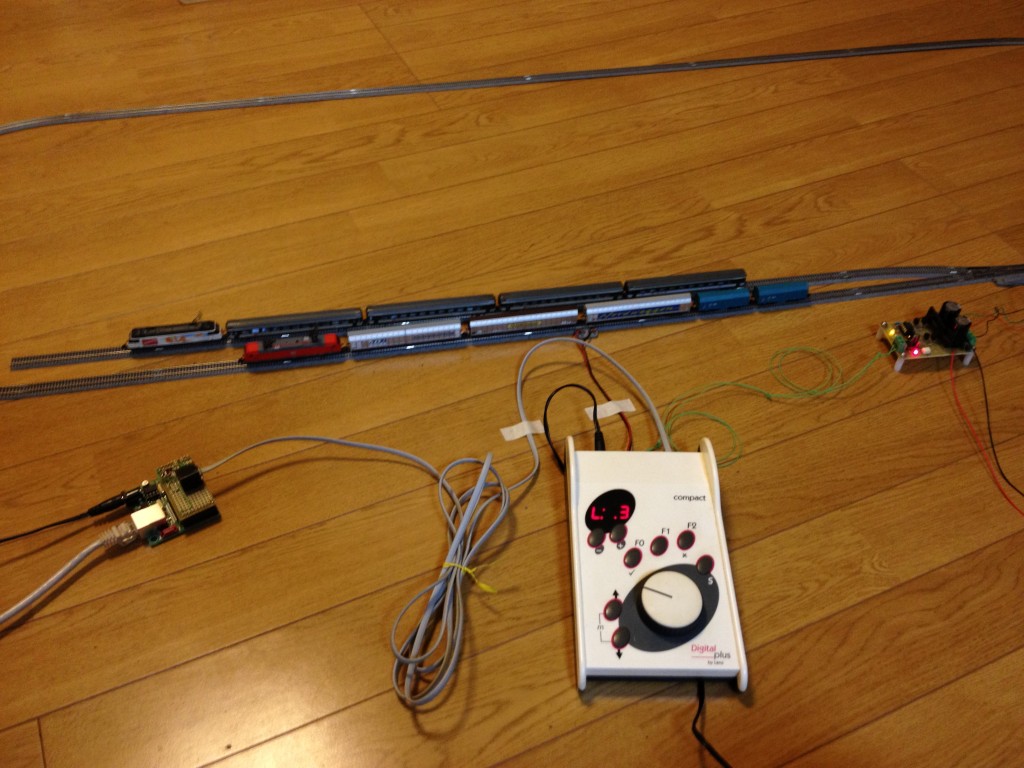

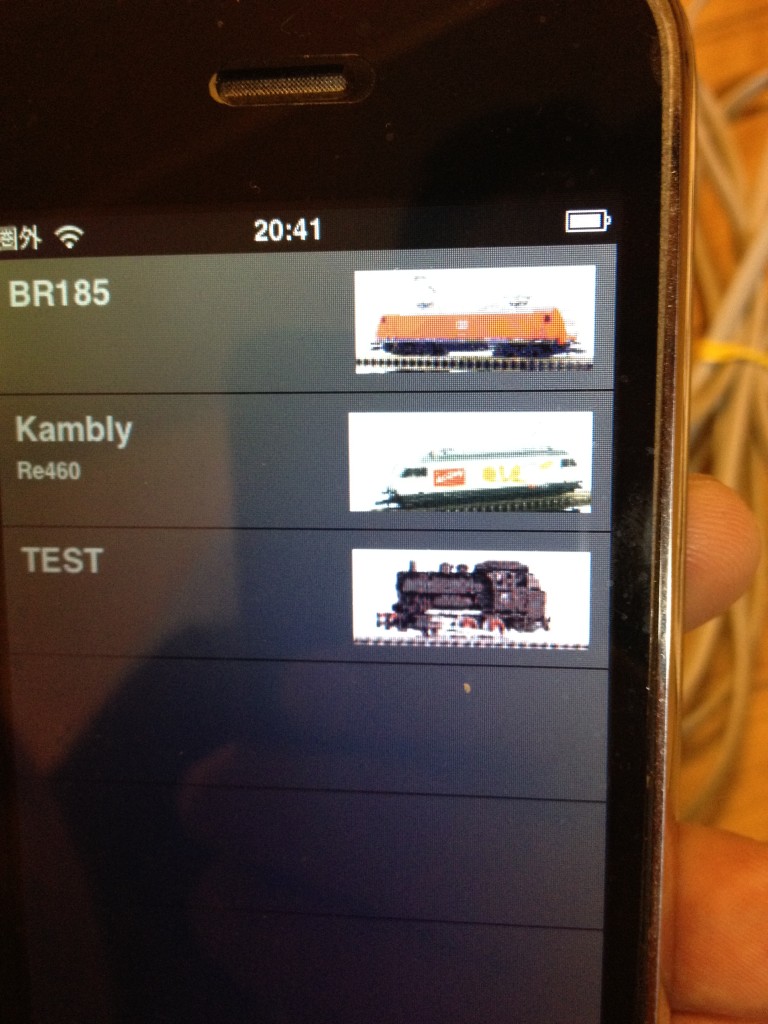
もっとも大きいのが、iPhone等による制御ですかね。写真による識別も出来ますし、コードレスになるのは大変楽です。古くなって使わなくなったiPhoneをWifiで接続してスロットル代わりにできます。
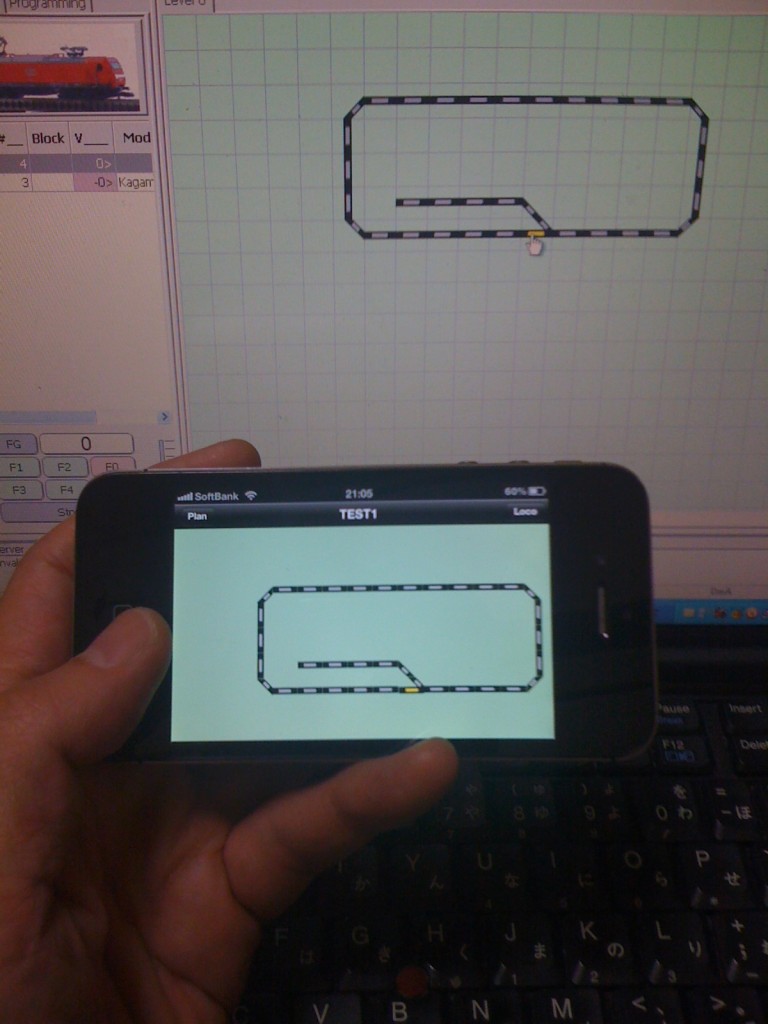
レイアウト図も出てくるので、ポイント切り替えも出来ます。

ESUの高級なコマンドステーションを買えば、LANも付いてますしカラー液晶で同じことが出来ますね。今だとRocoのZ21とかLAN付きで表示なし(タブレットを活用)とか選択肢はたくさんありますので、XnTCPを作ってまで接続することはないのでしょう。
DIY的な安いものから高級機まで様々でコマンドステーション選びは難しいですが、最終的に自動運転みたいなことがやりたいのであれば拡張バス(LoconetやXpressnetなど)が付いたものが良いかと思われます。趣味なので、それぞれの楽しみ方があってよいのではないかと。いろいろ拡張するとお金ばかりかかる趣味ではあります(笑)